速度環 位於 伺服驅動器 內三個控制環(位置環 =>速度環 =>電流環)的中間位置.命令來自 位置環的輸出 或 速度模式命令,速度環的運算輸出 便是 電流環的命令輸入.本篇提供台達 A2 與 M 系列驅動器 之 速度環控制架構圖,乃手冊中各章節資料彙整而成,除 控制器 本體(虛線部分)外,也加入 命令來源種類(虛線上方),以及 相關參數 與 監視變數,使 資料集中完整以方便閱讀:(點選 圖中區塊 可連結更多說明)
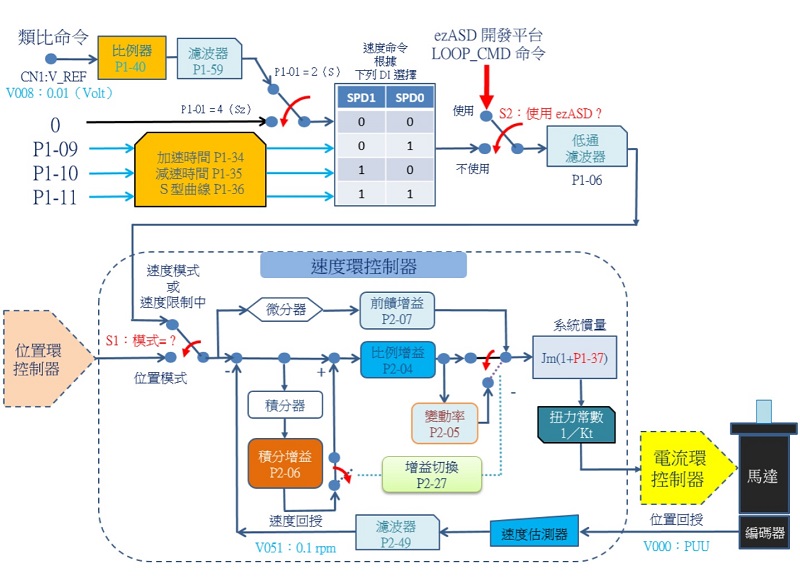
圖中各區塊說明如下:
速度環 的命令來源:
由圖中的 S1(伺服當前的操作模式)決定:
- 位置模式:速度命令來自 位置環控制器 的輸出,發生的條件為:
- A2/M 系列的 P1-01 = 位置 模式(含 CANopen 位置模式)
- M-R 機種 由 ezASD 開發平台 的 MODE 指令 為位置 模式.
- 必須 速度限制 未發生!
- 速度模式:速度命令來自 圖中上方區域,發生的條件為:
- A2/M 系列的 P1-01 = 速度模式(含 CANopen 速度模式)
- M-R 機種 由 ezASD 開發平台 的 MODE 指令 設為 速度模式.
- 非速度模式 但 速度限制 作用中!
速度模式 的 命令種類:
- A2/M 系列,當 P1-01=2 或 4,由 DI =(SPD1,SPD0)來選擇:
- M-R 機種由 ezASD 開發平台 的 LOOP_CMD 指令來設定命令.
- 低通濾波器:所有命令皆可用 P1-06 做濾波,單位是 ms.
速度控制器 包含的增益:
回授狀態的監視變數:
參考資料:電流環 控制架構圖-台達伺服