伺服電子齒輪比(P1-44 & P1-45)的配置往往是運動控制案例首當其衝的課題
本文以兩個Q&A演示電子齒輪比的推算過程,藉此釐清公式換算之關係。
如有需要,讀者可先回顧 PUU 位置單位 觀念說明 以加深電子齒輪比之觀念
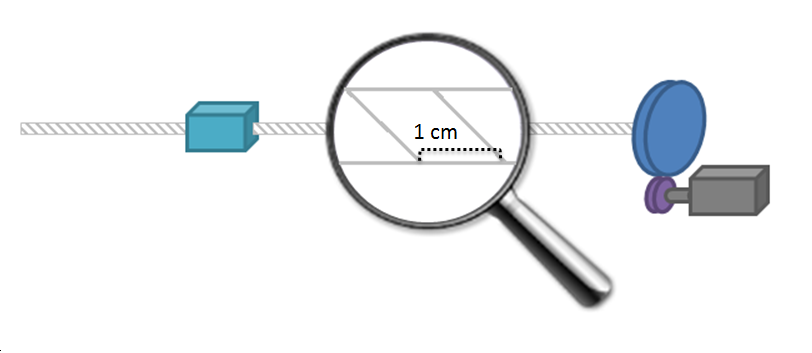
Q1. 如下圖配置示意,螺桿的pitch為1 cm,且馬達與螺桿的機械齒比關係為 10 : 1,求電子齒輪比P1-44 與 P1-45 設定值為何較洽當 ?
<解>
螺桿的pitch為 1 cm,故螺桿轉動1圈相當於滑台移動 10000 μm,得出公式 a.
a. 1 rev = 10000 μm
![]() 我們已較細的單位「 μm」來計算 ,故 1 cm = 10000 PUU
我們已較細的單位「 μm」來計算 ,故 1 cm = 10000 PUU
又馬達與螺桿的比例關係為 10 : 1 (馬達轉動10圈 = 螺桿轉動1圈) , 故得出公式 b.
b. 1 rev = 10 * 1280000 * P1-45 / P1-44
因此由公式 a. 與 b. 的對等關係中得出齒輪比為:
10000 = 10 * 1280000 * P1-45 / P1-44 > P1-44 : P 1-45 = 1280 : 1
該電子齒輪比的配置下PUU已相等於μm,故欲讓滑台移動 3000 μm則可控制伺服馬達增量 3000 PUU
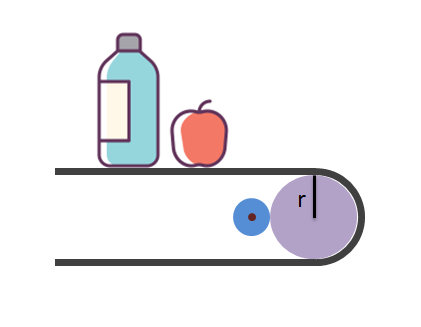
Q2. 如下圖輸送帶示意,輸送帶圓盤半徑r為 10 cm,該馬達與輸送帶的機械齒比關係為 5 : 1 , 求電子齒輪比P1-44 與 P1-45 設定值為何較洽當 ?
<解>
圓盤轉1圈相當於輸送帶移動該圓周 2πr,得出公式 a.
a. 1 rev = 2 * 100000 * π
![]() 我們已較細的單位「 μm」來計算,故半徑 10 cm = 100000 PUU
我們已較細的單位「 μm」來計算,故半徑 10 cm = 100000 PUU
又馬達與輸送帶的機械齒比關係為 5 : 1 ,得出公式 b.
b. 1 rev = 5 * 1280000 * P1-45 / P1-44
因此由公式 a. 與 b. 的對等關係中得出齒輪比為:
2 * 100000 * π = 5 * 1280000 * P1-45 / P1-44 > P1-44 : P1-45 = 128 : 4π => 12800 : 1256
該電子齒輪比的配置下PUU已相等於μm,故欲讓輸送帶移動 3000 μm則可控制伺服馬達增量 3000 PUU