如果有兩段路徑分別是由 A 走到 B,之後又由 B 走到 C,如何讓 A->B 可以不減速到 0就可以平順的銜接走下段 B->C的路徑。
在我們的二次平台裡有個基本指令 MC_OPT (Motion Option)指令可以指令 Overlap 屬性,讓接下來的運動以重疊的方式進行。(大家自行參考ezASD 中指令說明)
而重疊的方式為前一段命令進入到減速段時,下一段的命令就可以開始啟動,而不是等到前一段命令結束(減速到0),如此就可以讓速度較為平順。
可以參考下圖最右邊圖示:

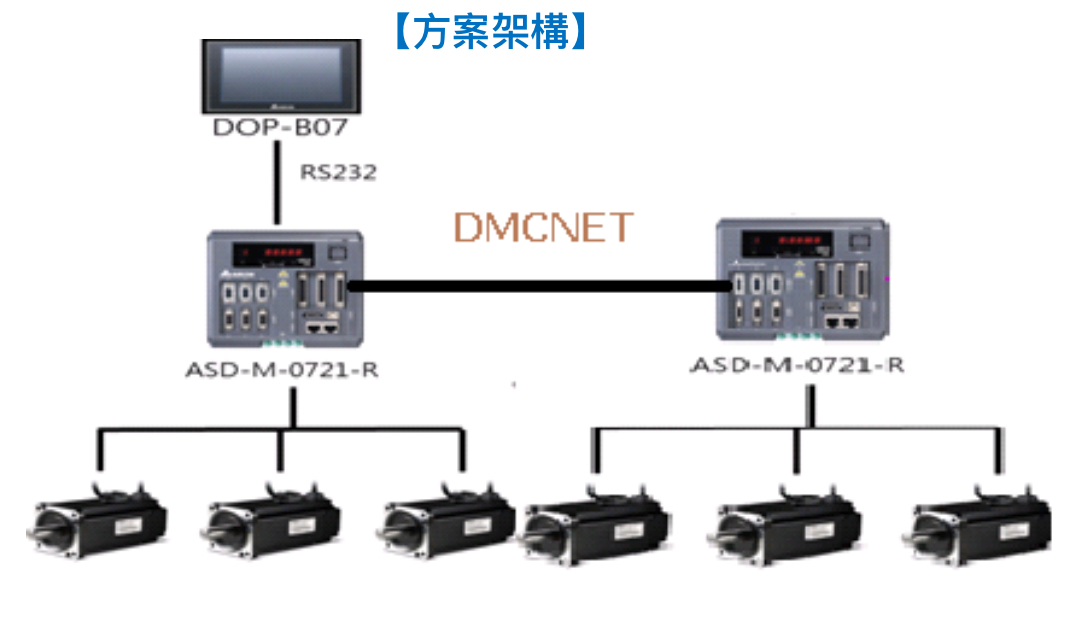
ASD-M-R 應用實例
如果有兩段路徑分別是由 A 走到 B,之後又由 B 走到 C,如何讓 A->B 可以不減速到 0就可以平順的銜接走下段 B->C的路徑。
在我們的二次平台裡有個基本指令 MC_OPT (Motion Option)指令可以指令 Overlap 屬性,讓接下來的運動以重疊的方式進行。(大家自行參考ezASD 中指令說明)
而重疊的方式為前一段命令進入到減速段時,下一段的命令就可以開始啟動,而不是等到前一段命令結束(減速到0),如此就可以讓速度較為平順。
可以參考下圖最右邊圖示:

高速繞線機運用在繞 DC 無刷馬達的定子槽內繞機,產品包括:風扇、排風機、洗衣機、電動車等馬達…
此方案使用台達 M-R 智能伺服系統,除了是三合一伺服驅動外,內建運動控制、邏輯控制並可外接 9 站裝置(種類:伺服、IO版…)。優越的運動控制不但可以精準的多軸同動、降低機械運作噪音、便利的步序(三次平台)編程大大降低了終端客戶更換工件的時間與麻煩。更多訊息=> 刚柔并济 驱控一体 台达M-R成就高速绕线方案
最近一期的台達機電電子報(124期)有篇 M-R 理料的案例,詳情見 台達交流伺服驅動系統打造卓越理料線解決方案,實現高精高速食品包裝排列工序,


本篇提供 台達 M-R 伺服 的 巨集 #F 範例專案,使用者可以依照本篇的說明,將專案執行起來,藉以熟悉 巨集#F 在 凸輪強制位移,防止誤切(或 夾料反轉) 的使用方法!本範例 操作影片 請參考 => YouTube,优酷
本篇提供 “分度功能的用途 – 影片” 一文中實際使用的台達 M-R 專案,使用者可以依照本文說明,將專案執行起來,藉以熟悉 分度定位 與 定點停車 的使用方法!

本篇提供 “電子凸輪警報後,不必回原點-影片” 中實際使用的台達 M-R 專案,使用者可以依照本篇說明,一步步的將專案執行起來,藉以熟悉 巨集#D 的使用方法,以達到凸輪故障後不回原點,迅速恢復相位,立即接續工作的目的!


倒單擺 是天生不穩定的系統,必須靠控制法則使其穩定.控制器 須具備 高速取樣 與 即時運算 的能力,以往必須靠 韌體實作 才有機會實現!台達 ASD-M-R 伺服驅動器 內建 ezASD 運動控制開發環境,提供 即時多工能力,可以輕易實現此類 閉環控制,本例為 產碩學生 實做的倒單擺 PID控制,雖然不算完美,但開始試車僅短短一小時就能達到如此效果,代表 M-R 的開放度與效能 都極為優秀,在 業界與學界 都有良好的發揮空間,影片如下:
之前談到如何使用高速Capture達到高精的凸輪應用,有些應用上需要多個高速抓取功能,但M-R只有三個高速抓取的DI(每軸的DI5),如果能夠同一個高速抓取DI 啟動多個凸輪可以將寶貴的高速抓取應用到更多的資料擷取,做法可參考附件範例,此方案程式碼只有開機初始化