如果有兩段路徑分別是由 A 走到 B,之後又由 B 走到 C,如何讓 A->B 可以不減速到 0就可以平順的銜接走下段 B->C的路徑。
在我們的二次平台裡有個基本指令 MC_OPT (Motion Option)指令可以指令 Overlap 屬性,讓接下來的運動以重疊的方式進行。(大家自行參考ezASD 中指令說明)
而重疊的方式為前一段命令進入到減速段時,下一段的命令就可以開始啟動,而不是等到前一段命令結束(減速到0),如此就可以讓速度較為平順。
可以參考下圖最右邊圖示:

智能伺服驅動器的說明
如果有兩段路徑分別是由 A 走到 B,之後又由 B 走到 C,如何讓 A->B 可以不減速到 0就可以平順的銜接走下段 B->C的路徑。
在我們的二次平台裡有個基本指令 MC_OPT (Motion Option)指令可以指令 Overlap 屬性,讓接下來的運動以重疊的方式進行。(大家自行參考ezASD 中指令說明)
而重疊的方式為前一段命令進入到減速段時,下一段的命令就可以開始啟動,而不是等到前一段命令結束(減速到0),如此就可以讓速度較為平順。
可以參考下圖最右邊圖示:

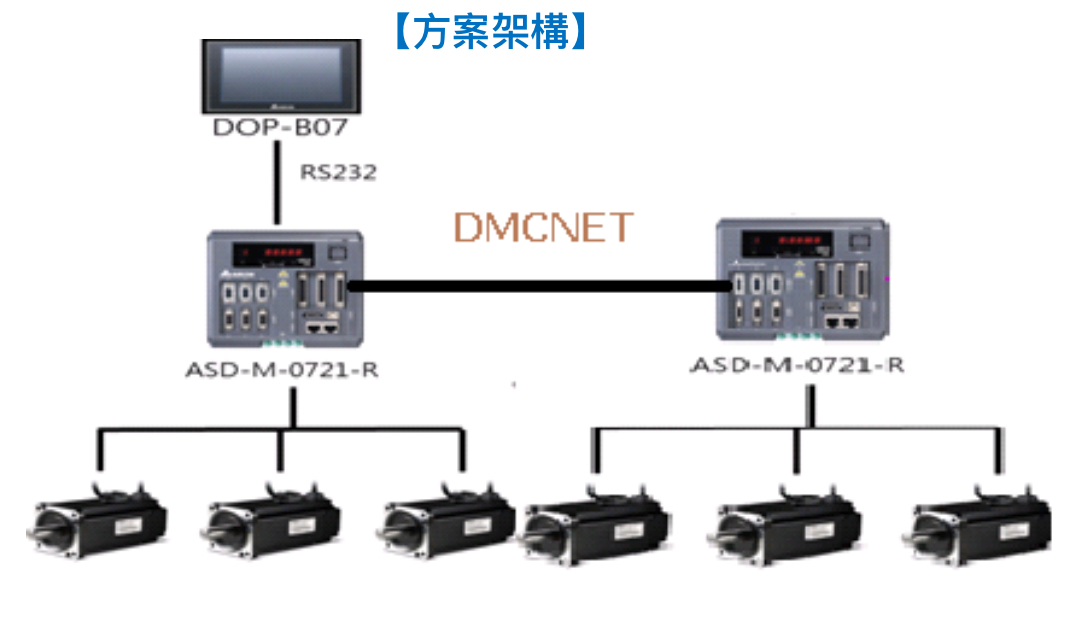
高速繞線機運用在繞 DC 無刷馬達的定子槽內繞機,產品包括:風扇、排風機、洗衣機、電動車等馬達…
此方案使用台達 M-R 智能伺服系統,除了是三合一伺服驅動外,內建運動控制、邏輯控制並可外接 9 站裝置(種類:伺服、IO版…)。優越的運動控制不但可以精準的多軸同動、降低機械運作噪音、便利的步序(三次平台)編程大大降低了終端客戶更換工件的時間與麻煩。更多訊息=> 刚柔并济 驱控一体 台达M-R成就高速绕线方案
最近一期的台達機電電子報(124期)有篇 M-R 理料的案例,詳情見 台達交流伺服驅動系統打造卓越理料線解決方案,實現高精高速食品包裝排列工序,

水能載舟亦能覆舟
「多工」是運動控制的一項利器,但如果使用不當是可能替程序埋下一顆未爆彈
再者,多工所衍生的錯誤往往不好偵錯也不易重現,因此如何提升程序穩健性? 以正確的多工觀念來開發是大家必精進的課題
本文以ServoMotion的多工機制為基礎,演示一些容易衍生錯誤的多工手法,盼讀者能以之為借鏡,避免重蹈覆測。
凸輪應用中經常需要從軸在原來的主軸位置上修正從軸的位置,(也就是原來的主軸不動,單獨讓從軸動)
這有兩種方法操作
台達智能伺服有很多種修主軸的方式,
A2 有 P2-77(主軸遮末)參考 A2 虛擬主軸設定;跟使用同步抓取軸後利用 P1-16 或 P5-79 來修正主軸; 參考同步軸
M-R 的參數功能有同步抓曲軸跟 P1-16/P5-79 的功能,
但 P1-16/P5-79 僅能在主軸來源為同步抓曲軸的情況下才能使用,且 M-R 並沒有提供 P2-77 的功能,
M-R 如何做到 P2-77 的功能呢?
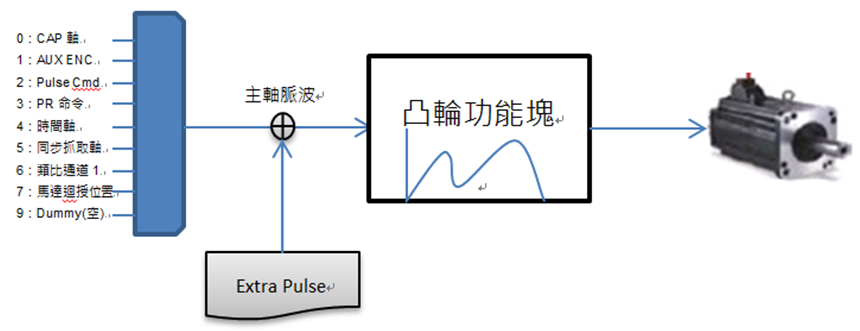
可以利用下列指令做到
SACCL_SV v94_Extra_ECAM_Master_Pls,X_AXIS ;將ACC資料灌入額外的凸輪主軸脈波
SACCL_SV 是寫入系統變數指令,其參數 V94_Extra_ECAM_Master_Pls 顧名思義就是額外的主軸脈波。
透過這個指令就可以達到 P2-77 的輸入主軸的功能。
示意圖如下
Read more

M-R 內部模擬出五核心的CPU架構,如下圖:
 Read more
Read more
下表是 M-R PLC 分區表
 Read more
Read more
以下是M-R培訓的內容: Read more