台达伺服 A2 与 M-R 系列,内建的 电子凸轮 包含 “凸轮角度输出“,即 DO.CAM_Area,每轴提供2组,本文描述其 使用方法 与 注意事项,供 读者 参考,参数的设定如下:
主轴角度信号 CAM_Area 1,2 的 设定方法:
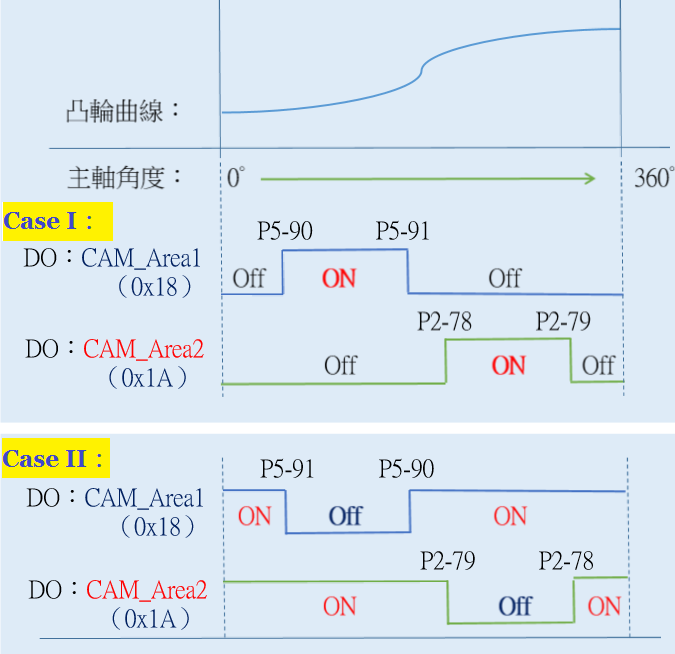
- CAM_AREA1:功能码为 0x18
- 上升缘 P5-90:主轴角度 超过此参数,输出 Off => ON
- 下降缘 P5-91:主轴角度 超过此参数,输出 ON => Off
- CAM_AREA2:功能码为 0x1A
- 上升缘 P2-78:主轴角度 超过此参数,输出 Off => ON
- 下降缘 P2-79:主轴角度 超过此参数,输出 ON => Off
DO 运作的时序图 如下:
此二 DO 使用时的注意事项 说明如下:
- 参数大小顺序 上图中,Case I 与 Case II 的差别在于 参数大小顺序不同,但 DO 输出状态 的判断规则 都是一样的:即 当主轴角度 由小而大 变化时,遇到 上升缘参数(P5-90,P2-78)输出就会 ON,遇到 下降缘参数(P5-91,P2-79)输出就会 Off!
- 凸轮啮合才输出 此二信号在 凸轮啮合 时才会依上述规则输出,否则一律为 Off!若需要在 Servo Off 时保持 凸轮啮合,可以设定 P5-88.X1 = 1.
扩充 角度信号的方法:
如果2组 DO.CAM_Area 信号仍不敷使用,可参考以下作法:
- 上升/下降缘 每一信号 其实是一个角度范围,故可将 二组 上升/下降缘 当成4个信号 来使用!
- 用别轴的信号 若一个主轴同时带动多个从轴,可利用其他伺服的 CAM_Area 信号,但不同轴的啮合时机可能不同,因此角度可能会有 偏移量(Offset),使用时须注意!
- M-R 自行撰写 如果是 M-R 机种,便可用 二次平台 将 主轴角度 的 监视变数(V3Eh_ECAM_X_POS) 读出并比较,即可自行造出 角度信号!须注意:角度单位不是 0 ~ 360度,而是 0 ~ (P5-84/P5-83)-1 对应 凸轮一週.
参考资料:凸轮主轴 角度输出信号 的用途,台达伺服 DO 功能 对照表