Delta ASD-A2 凸轮 同步轴 的展示影片于本篇分享,首先介绍机构组成如下:
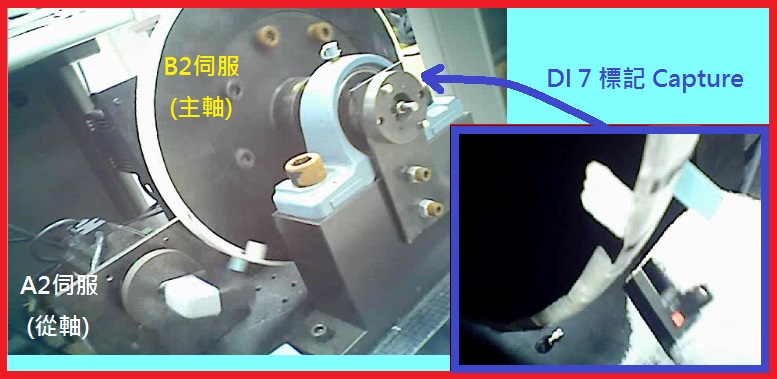
大转轮:凸轮主轴,由ASD-B2 伺服驱动,将本身 CN1:OA/OB 脉波传给 A2 做脉波源
小转轮:凸轮从轴,由ASD-A2 伺服驱动,主轴标记感测接到 A2 的 DI 7 做 Capture
由于大轮转一圈,小轮也转一圈,因行走长度不同,故凸轮採用飞剪曲线,让盖印时主/从轴速度吻合!A2 凸轮主轴选用同步轴 (P5-88.Y=5),设定请参考 设定方法!
影片1:同步轴 干扰抑制 - 影片连结:优酷 Youtube
说明:因主轴解析度来自 B2 伺服 OA/OB 的 P1-46设定,预设为 2500,四倍频后为 10000 就是一圈的脉波数.影片中一开始盖印区准确落在目标区黑线内,但我们故意将主轴 P1-46 修改为 2400 来模拟干扰,相当于一圈短少 400 脉波( -4%),但 A2 同步轴会自动修正,让盖印又落在目标区,稳定运行几圈后 又将 P1-46 改回为 2500,相当于一圈多了 400 脉波( +4%),但经过2圈 又马上修回正确的位置了!正常而言脉波不会变动这麽多,因此 同步轴可以有效对抗干扰,避免累积误差,只要参数设定好 一切就会自行处理了!
影片2:同步轴 相位调整 - 影片连结:优酷 Youtube
说明:同步轴可以让 主/从轴一直维持固定的相位关係,若这个相位不是我们要的该怎麽办?其实可以透过修改 同步误差参数 P1-16 或 P5-79 来调整 [注 1] !影片中一开始盖印不在目标区内,于是 设定 P5-79 = 300(单位也是主轴脉波数,此例一圈为 10000 PLS,相当于修了 3%),笔者在操作软件改 P5-79 花了些时间,其实影片中只花了2圈就修正完成了[注 2].
[注 1] 同步轴的作用 会一直设法把 同步误差 消为0,表示达到同步.修改 同步误差,可以让同步相位改变,作法是:
写入 P1-16的效果: 同步误差 = 当前误差 + P1-16 ,叠加当前同步误差
或写 P5-79的效果: 同步误差 = P5-79 ,忽略当前同步误差
读取 P1-16 与 P5-79 效果一样: 都是传回当前的 同步误差 (也可由 监视变数 V54h 读出)!
[注 2] 同步轴的修正率 可由 P5-80 来设定上限,数值越大 修正愈快,但速度波动也大!