本篇提供 “分度功能的用途 – 影片” 一文中实际使用的台达 M-R 专案,使用者可以依照本文说明,将专案执行起来,藉以熟悉 分度定位 与 定点停车 的使用方法!
范例操作说明:
- 下载 专案档(index.zip),并解压缩.载点:Dropbox
- 利用 ASD-Soft 将 参数档(Index.par)下载至 M-R,再 重新上电!
- 利用 ezASD 开启 专案档(TstIndexer.mrj),编译后下载至 M-R 中,然后执行(Run)即可!
其中 参数档 的作用是设定 分度周长(P2-52)与 齿轮比(P1-44/P1-45),其馀并不重要!使用者可依需要自行修改.
分度坐标周长的设定法:
做 分度定位 首先必须决定 分度坐标的周长,即 P2-52,是 PUU 单位.然后再根据机械的减速比计算出伺服的电子齿轮比,顺序必须正确(先决定 P2-52,再计算 P1-44/P1-45),千万不要搞反了!分度一週的大小是由使用者自己决定才是合理的!本范例定义转盘一周 P2-52 = 10000 PUU,由于是马达直接驱动,没有减速机,所以齿轮比 P1-44/P1-45 = 128/1.(A2 马达一圈的编码器单位是 1280000 PLS/Rev)
范例内容说明:
本范例仅使用到 X轴.依据 分度功能-影片 的示范,透过 DI 1~6(X0.0 ~ X0.5)即可演示整个过程,专案中所有 DI 都是利用 背景 PLC 程序来定义的,如下所示:
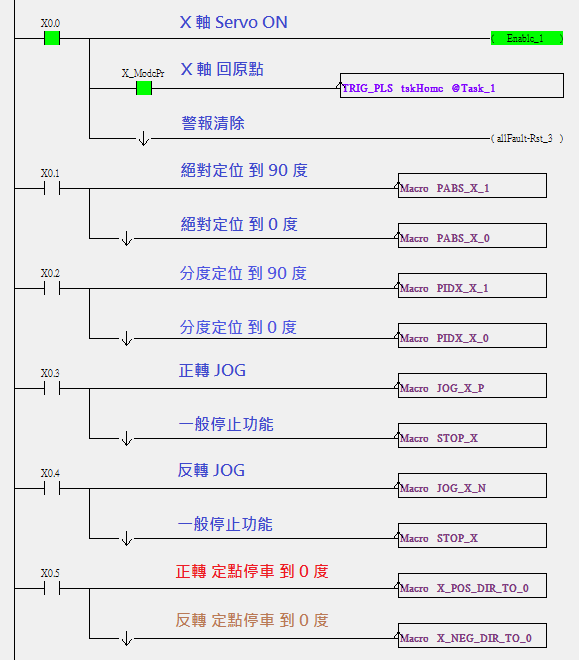 其中最核心的是由 DI5(X0.4)触发的 定点停车 工作,程式内容如下:
其中最核心的是由 DI5(X0.4)触发的 定点停车 工作,程式内容如下:
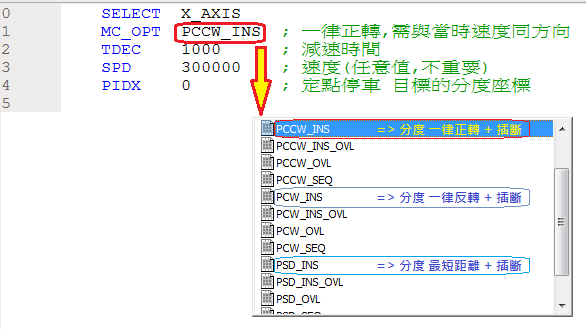 观察上述程式码,定点停车 也是使用 分度定位指令 “PIDX” ,只是执行于已经有速度的情况,所以定位的方向必须与当时的速度同方向,停车才会平顺,不反转!分度指令的方向由 “MC_OPT” 指令来设定,如下:
观察上述程式码,定点停车 也是使用 分度定位指令 “PIDX” ,只是执行于已经有速度的情况,所以定位的方向必须与当时的速度同方向,停车才会平顺,不反转!分度指令的方向由 “MC_OPT” 指令来设定,如下:
- 一律正转:PCCW_INS ,适合 速度为正的 定点停车.
- 一律反转:PCW_INS ,适合 速度为负的 定点停车.
- 最短路径:PSD_INS,适合 分度定位,不适合 定点停车!
因此使用者必须依据 想要的是 分度定位(刀库,旋转工作臺),还是 定点停车(凸轮主轴)来设定 MC_OPT 选项,才能得到正确的动作.
参考:分度功能的用途 – 影片,分度坐标定义,分度/直线坐标比较