在傳統機械裡,軸與軸之間是靠機構來傳動的,例如下圖所示,主/從軸間以一條 平皮帶 相連,當主軸開始轉動,從軸也一起轉動!假設主/從軸的輪徑相同,並在輪上都做一個 ∇ 標記,初始的位置都在正上方.經過一段時間的運轉後,由於皮帶的打滑,主/從軸輪徑誤差等諸多因素,發現主/從軸上的標記 ∇位置不一樣了!表示主軸與從軸的相位偏移了!
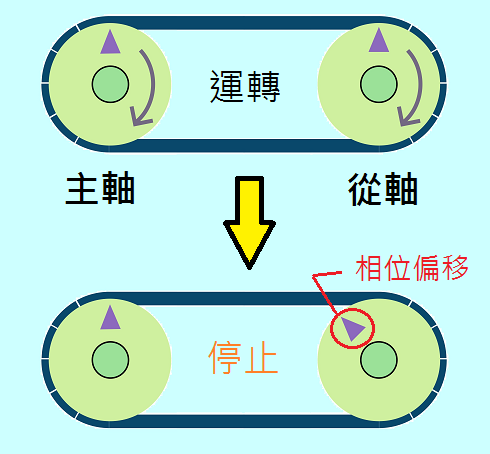
圖(一)平皮帶傳動 發生相位偏移
如果只是單純用來傳輸動力(例如引擎中的發電機皮帶),相位的偏移並無關係;但若做為同步的控制(例如引擎中控制汽門,曲軸與點火時機的皮帶),就會發生問題!以機構而言,要避免相位偏移,可 以把一般的皮帶換成 正時皮帶(Timing Belt)跟齒輪!如下圖所示,即使長時間運轉,主/從軸的相位都能維持一致!就是彼此達到 同步狀態!
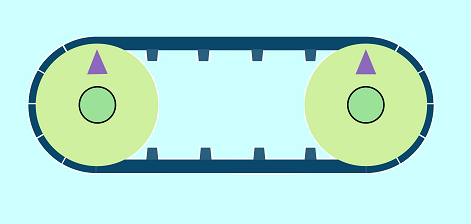
圖(二)正時皮帶可維持相位同步
講了這麼多,終於可以進入正題了!如果把上述的機械傳動改成 伺服的電子凸輪,效果會是如何呢?如下圖三,我們將皮帶拆除,用編碼器採集主軸的位置,以A/B相脈波的方式傳給伺服,伺服以直線的電子凸輪來驅動從軸做跟隨:
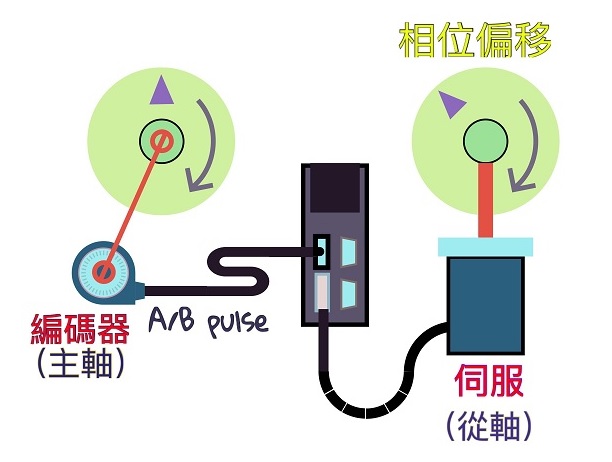
圖(三)將皮帶傳動改成伺服電子凸輪-發生偏移
實測結果發現,相位發生了偏移,因為編碼器的脈波受到干擾,而且會隨時間累積,造成偏移愈趨明顯!而脈波干擾是很難完全抑制的,在工廠多變的環境下,不論配線如何講究,脈波偏差總會發生,只是時間早晚的問題!因此,單純以編碼器脈波驅動電子凸輪,無法達到正時皮帶的同步效果,頂多是平皮帶的效果而已!
那麼該怎麼改善呢?其實我們可以效法正時皮帶,因為它是帶"齒"的,所以不會滑動造成累積誤差!那我們就用一個假想的"齒"來模仿它!並把齒的寬度(就是齒與齒的距離)定義清楚,這樣就可以造出一個虛擬的 正時皮帶,就是所謂的”同步軸”!這個"齒"可以用主軸上任何一個週期性出現的信號(或編碼器的Z)來表示,如下圖:
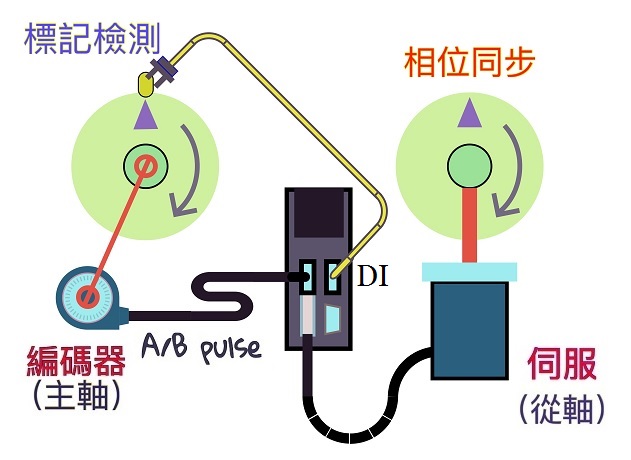
圖(四)使用同步軸-避免相位偏移
在主軸上安裝一個標記當作"齒",並用感測器將信號讀進伺服的DI,再根據編碼器的型號 得知主軸轉一圈應該會有 R 個脈波.由於一圈只有一個齒,所以齒的寬度就是R(單位是主軸的脈波).如此,只要伺服每感測到一個"齒",就知道應該要收到R個脈波,如果數量不對,就可加以補償,讓脈波總數一直跟齒數維持正確的關係,如此便可讓主/從軸的相位永不偏移,保持同步!這功能在台達 ASD-A2 與 ASD-M-R 伺服裡都已具備,在凸輪的主軸來源 P5-88.Y 裡,選擇 實體脈波 相當於使用 平皮帶;選用 同步軸 就相當於使用 正時皮帶,非常方便!設定方式請參考 A2凸輪 同步軸的 設定方法!
註:克服凸輪主軸脈波漏失 還有其他方法,例如:
1,採用虛擬主軸 不會漏脈波,但是主軸也必須使用伺服馬達,無法採用一般馬達外加編碼器的方式!
2,利用凸輪對位 雖然可以做到,但通常會保留給 從軸的修正使用,因為從軸的誤差補償會用到!