A2 伺服 凸輪脫離後,接一段 PR 定位命令,是常見的應用方式。但 PR 必須接上凸輪脫離時的速度,初速不可為 0(作法可參考 => 凸輪 如何銜接 PR),才不會有劇烈震動!此外,仍有二個陷阱,使用時必須留意:
- 避免使用 脫離條件 P5-88.U = 2:
- 如果需要指定凸輪在 主軸脈波數 = P5-89 處 自動脫離 [註 1],且連接 PR 定位,請使用脫離條件 #6,不要用 #2,以免最後一次的凸輪速度會突然掉下來,造成機械震動。因為凸輪的速度跟主軸脈波頻率成正比,指定 P5-89 個脈波在最後一次 計算凸輪命令時,可能只剩微小的量,因而造成最後一次凸輪命令 幾乎為 0!
- PR 無法維持在 凸輪脫離時的速度!
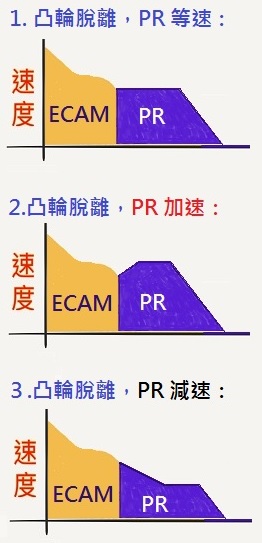
- 雖然這不是必須的,但常常被提出,會希望 PR 維持在凸輪脫離時的速度,直到目標到達前才減速,也就是如下圖(1)所示。然而,只要定位距離足夠,PR 有朝向 目標速度邁進的趨勢,由於 PR 目標速度是預先定義的,而凸輪脫離速度 卻不固定,所以實際運作就會如下圖(2)或(3),不是繼續加速,就是減速到 PR 目標速度,讓整個動作不太自然!
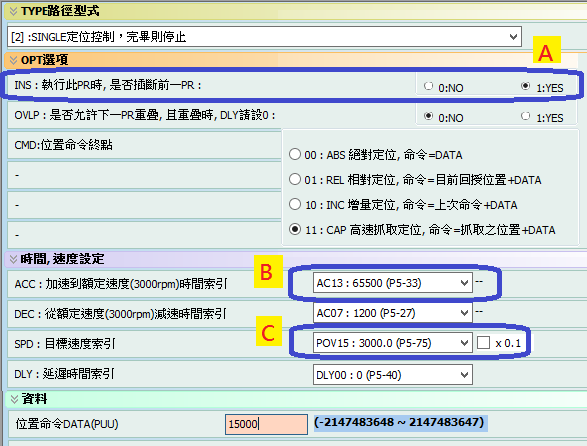
- 解決的方法:PR 定位命令 設定如下:
- 勾選 插斷(INS),才會銜接凸輪速度.
- 加速時間 設為最長 = 65500 ms
- 目標速度 設為 = 最高速度 P1-55:例如 3000 ~ 5000 rpm,確保一定比凸輪速度快!
這樣設的原理是,讓凸輪脫離接 PR 時,一定會加速,而且用最慢的 加速時間(65.5秒),所以看起來近似等速,只要定位距離不長,速度其實提升不多,便會開始減速了,這是一種變通的方法,可以達到(近似)等速 的效果!
參考:凸輪 如何銜接 PR,絕對/增量/相對/CAP 定位.
[註 1] 使用脫離條件 P5-88.U = 6 或 2,稱為 “自動脫離“,若要銜接 PR 命令(不論是定位 還是定速命令),切記用 U=6 (不要用 2)!另外,直接用 PR 寫參數 P5-88 = 0 稱為 “強制脫離“,設定方法請參考 => 凸輪 如何銜接 PR,有 PR 流程解說.