本文針對 皮帶 或 滾輪機構(不包含 分度盤/刀塔)[註 1],只要輸入 機械參數與使用者指定的脈波單位(PUU),就能算出對應的齒輪比.同樣也提供模擬資訊,根據輸入的工作速度(V),算出 馬達轉速 與 上位機脈波頻率,是用來驗證 系統需求 是否滿足的好幫手!使用步驟如下:
- 輸入 使用者單位(PUU)與 機械單位(mm)的關係
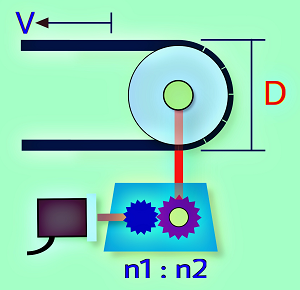
- 輸入 機械的 減速比(無減速時為 1:1)
- 輸入 滾輪的 直徑(D) 或 圓周長
- 輸入 編碼器一圈(PLS)數,即電子齒輪比 1:1 時,要收到多少(PUU)伺服才會走一圈!
- 按下 “計算齒輪比” 即可得到 分子:分母 的數值
- 選擇 “有效數字位數“:用來指定 分子 的數值寬度 [註 2],建議6以上!
- 輸入 機構移動的 線速度 V 來檢視 模擬結果 是否滿足需求?
當輸入了 機械的線速度(V)後,模擬資訊 便會顯現,各欄說明如下:
- 對應 馬達轉速:不可超過馬達最高速度,若超過請 減小 減速比,或增加 滾輪直徑.
- 命令 脈波頻率:必須小於上位機(PLC)的最高脈波頻率(否則上位機發送的脈波無法達到要求的線速度),若超過請修改 PUU 單位 來加大 電子齒輪比!如果 伺服位置命令來自驅動器本身(智能伺服),則可忽略此項訊息.
- 馬達 一圈 PUU 數:最好不要小於 5000,以免馬達運轉不夠平順,轉速愈低則愈明顯!縮小 電子齒輪比 可改善之.
使用本工具若有任何問題請於下方留言,本工具的計算公式請參考 齒輪比公式推導,將文中 導程 當成 滾輪周長 即可!
[註 1] 本篇的 轉輪機構 著重在驅動 皮帶,或是 滾筒送紙 這類用途,長度的計算包含 圓周率 π,是無理數,齒輪比只是近似值!不適合 分度轉盤/刀塔 這類的應用,以免產生累積誤差!分度盤(著重在圈數,不是長度)齒輪比可參考 => 分度盤/刀庫-齒輪比計算.
[註 2] 由於 滾輪周長 計算包含 圓周率 π,是無理數,無法化成精確的 分子/分母 形式,只能求得近似值,因此提供”有效數字“選項.使用者可依 需求或驅動器的資料寬度 自行選擇!其實 這類機構本來就存在誤差的,直徑或圓周 無法量測準!一般會讓 機構轉一圈,量測皮帶實際走的距離,再輸入到”周長欄“,是一個縮小誤差的方法,提供給大家參考!