本篇提供 “分度功能的用途 – 影片” 一文中實際使用的台達 M-R 專案,使用者可以依照本文說明,將專案執行起來,藉以熟悉 分度定位 與 定點停車 的使用方法!
範例操作說明:
- 下載 專案檔(index.zip),並解壓縮.載點:Dropbox
- 利用 ASD-Soft 將 參數檔(Index.par)下載至 M-R,再 重新上電!
- 利用 ezASD 開啟 專案檔(TstIndexer.mrj),編譯後下載至 M-R 中,然後執行(Run)即可!
其中 參數檔 的作用是設定 分度周長(P2-52)與 齒輪比(P1-44/P1-45),其餘並不重要!使用者可依需要自行修改.
分度坐標周長的設定法:
做 分度定位 首先必須決定 分度坐標的周長,即 P2-52,是 PUU 單位.然後再根據機械的減速比計算出伺服的電子齒輪比,順序必須正確(先決定 P2-52,再計算 P1-44/P1-45),千萬不要搞反了!分度一週的大小是由使用者自己決定才是合理的!本範例定義轉盤一周 P2-52 = 10000 PUU,由於是馬達直接驅動,沒有減速機,所以齒輪比 P1-44/P1-45 = 128/1.(A2 馬達一圈的編碼器單位是 1280000 PLS/Rev)
範例內容說明:
本範例僅使用到 X軸.依據 分度功能-影片 的示範,透過 DI 1~6(X0.0 ~ X0.5)即可演示整個過程,專案中所有 DI 都是利用 背景 PLC 程序來定義的,如下所示:
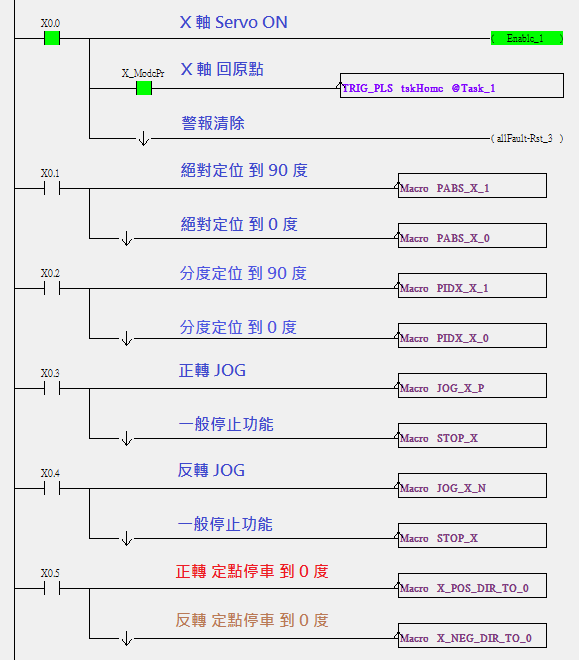
其中最核心的是由 DI5(X0.4)觸發的 定點停車 工作,程式內容如下:
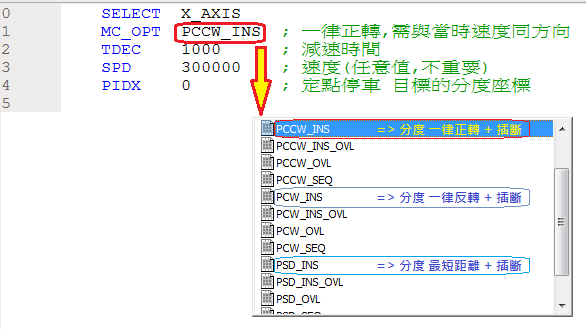
觀察上述程式碼,定點停車 也是使用 分度定位指令 “PIDX” ,只是執行於已經有速度的情況,所以定位的方向必須與當時的速度同方向,停車才會平順,不反轉!分度指令的方向由 “MC_OPT” 指令來設定,如下:
- 一律正轉:PCCW_INS ,適合 速度為正的 定點停車.
- 一律反轉:PCW_INS ,適合 速度為負的 定點停車.
- 最短路徑:PSD_INS,適合 分度定位,不適合 定點停車!
因此使用者必須依據 想要的是 分度定位(刀庫,旋轉工作臺),還是 定點停車(凸輪主軸)來設定 MC_OPT 選項,才能得到正確的動作.
參考:分度功能的用途 – 影片,分度坐標定義,分度/直線坐標比較