機械設計中,通常會藉由傳動元件(例如齒輪,皮帶,鏈條,螺桿… 等等),將動力傳遞到機械末端來工作。然而,由於傳動機構的撓性,背隙 … 等因素,會對機械的精度有不良的影響!本文提供一種量測 “傳動誤差” 的方法,不需要昂貴的儀器就可以做到 …
原理概述:
如下圖,軸 A -> 輪 B 之間有許多傳動元件:
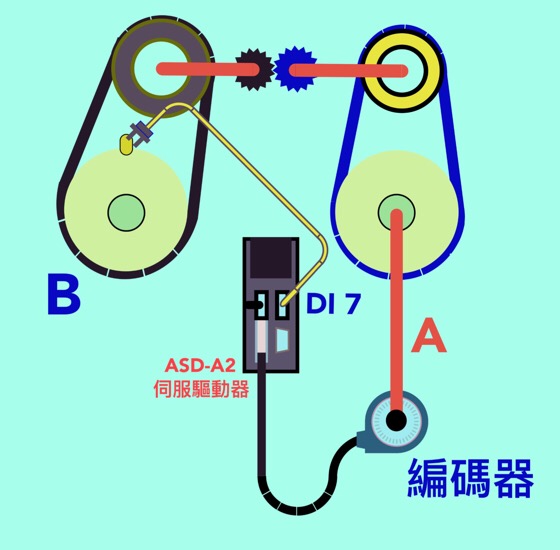
圖(一)傳動精度檢測架構圖
若想瞭解 軸 A -> 輪 B 之間的傳動誤差有多大,可以用 感測器 偵測 輪 B 上的標記,並將 軸A 連接一編碼器,然後令機構旋轉,抓取相鄰二次感測標記之間的 編碼器脈波 變化量,就可得知機構的 傳動誤差值,請參考示範影片(採用台達 A2 伺服的 同步軸功能 [註 1]):
Youtube:
优酷:优酷视频请至右上角简体版网页观看…
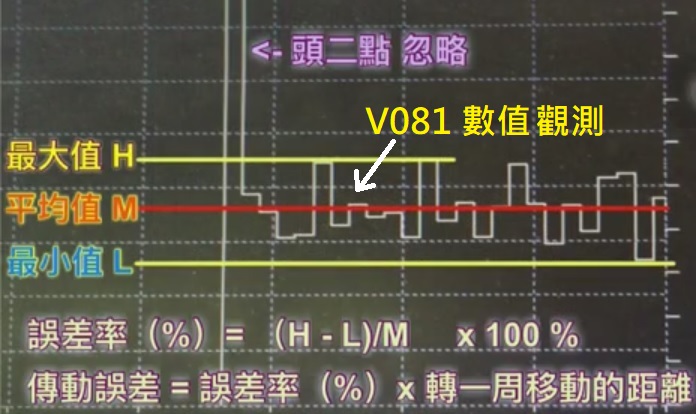
傳動誤差 的計算:
如果傳動機構是完美的剛性體,則每次抓到的 編碼器脈波增量(V081 變數)應該都是固定的數值,不會有變化,頂多是感測器的雜訊,通常在+/- 1 脈波以內,而剛性愈差的機構所得到的 V081 數值,則跳動愈劇烈!傳動誤差的計算公式如下:
在運動控制實際應用中,常見的狀況是:伺服馬達走的很準(追隨誤差都很小),但機械最終的效果卻不理想!利用本文的方法可以幫助釐清機械傳動精度是否太大了?對於問題查找會有一定的幫助!上圖(一)的架構看似複雜,但通常 軸A 的編碼器 用伺服馬達本身的就可以了,不需要另外安裝.影片中採用 磁鐵+螺絲 作為 感測標記 是為了安裝方便,如果機構本身已有凸出的螺絲 也可以直接使用.如果測出的 傳動誤差 在容許範圍內 可以不必理會,否則就必須加以補償,常見的的方法有:驅動器全閉環,感測器抓取位置做修正,凸輪對位 … 等等.
[註 1] A2伺服的設定可參考 “同步軸 的設定方法“,其中 P5-78 需設為 輪 B 轉一圈,軸A 編碼器 輸出的 理論脈波數。
進階開關的反應比一般慢,難道不會影響你的高速抓取嗎?
如果擔心感測器的反應,可先把 被感測的螺絲裝在與編碼器相同的軸上 加以量測!由於同一個軸的剛性很高,機械幾乎沒有誤差,此時量測到的誤差可視為 “量測裝置” 本身的誤差,就可得知感測器的誤差!此誤差通常都很小,因為量測時的速度通常不快而且是等速的狀況!以上供您參考!