點對點運動是最基礎的運動控制,ServoMotion內提供數個基本的點對點運動功能塊,本文我們以單軸情境演示不同功能塊該如何進行點對點運動。
在演示點對點運動前,我們先釐清一些有關模式與加減速度規劃的觀念。
ServoMotion中大致可分類有速度、扭力與位置三種模式,在下列的示例中,我們的目的都是由位置A移動至位置B情境,故很直覺的我們可以選用位置(PATH)模式來進行運動控制。
而在點對點移動的過程中,我們究竟又想用何種加減速模型去運動也是需要事先就規劃好的,就如下圖兩種加減速模型有著顯著的差異,但其實移動的距離(面積)皆是完全相同的。
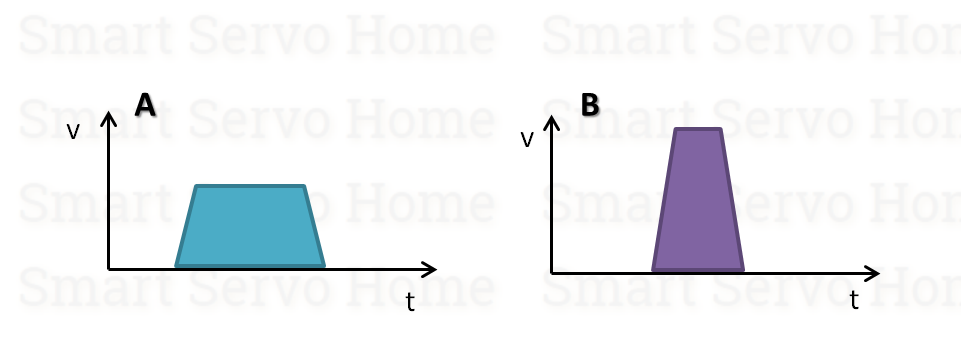
![]() 加減速模型A會比加減速模型B較慢抵達指定距離。
加減速模型A會比加減速模型B較慢抵達指定距離。
加減速規劃所需要設定的參數分別有 加速度時間(ACC)、減速度時間(DEC)與目標速度(SPD)。
加/減速時間的單位為 msec,代表速度由0加速至3000 rpm所需的時間。
而目標速度的單位則為PPS (PUU Per Second)。
● 單軸-點對點運動
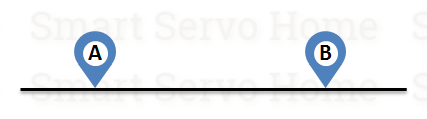
如下圖,假設PUU已相等於 μm , 若當前位置為A且欲移至目標位置B,該如何操作?
初始設定
對X軸進行Servo On 並將它設定為PATH模式。
;Servo ON X_Axis SET_BIT Enable_1 ;SET X_Axis Mode SELECT X_AXIS MODE PATH
![]() 模式的設定必須先啟動伺服方能操作
模式的設定必須先啟動伺服方能操作
方法1 – JOG/STOP
調用JOG讓馬達由位置A開始前進,直至抵達B後調用STOP後停止
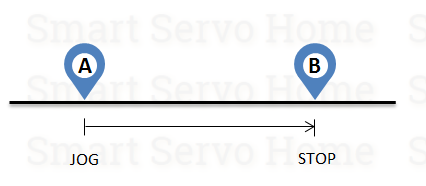
透過DI1啟動寸動,加減速規劃分別為 1000 msec ,1000 msec, 100000 PPS,當抵達位置B時可再靠DI2進行停止。
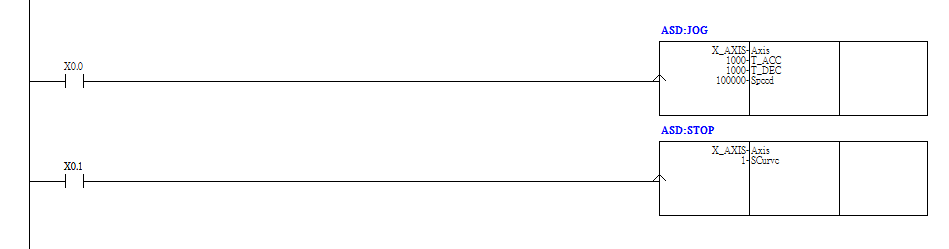
![]() 此方法透過外部訊號(sensor)下達STOP功能塊,事實上並無法準確的停止在B點,可改用方法2、3或使用Capture等方式,方能有較好的精度。
此方法透過外部訊號(sensor)下達STOP功能塊,事實上並無法準確的停止在B點,可改用方法2、3或使用Capture等方式,方能有較好的精度。
方法2 – MOVE_INC
以位置A為基準,欲移至位置B我們可調用增量移動(MOVE_INC)功能塊來達此目的。
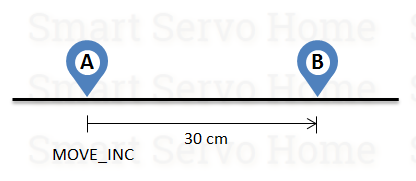
加減速規劃分別為 1000 msec ,1000 msec, 100000 PPS。因已知移動的距離為30 cm,故增量距離設定為 3000000 PUU (μm)。

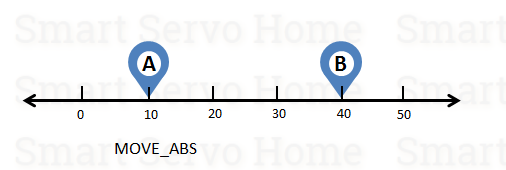
方法3 – MOVE_ABS
使用絕對移動的前提是須有定位座標系,為了達成座標定位我們可選用絕對型馬達或是以增量型馬達搭配原點賦歸功能塊,在這個示例中我們採用後者來座標定位,並以絕對移動的方式移至位置B
為了建立座標系,我們修改了初始化程式,讓它加上原點賦歸的功能。
;Servo ON X_Axis SET_BIT Enable_1 ;SET X_Axis Mode SELECT X_AXIS MODE PATH ;Home CALL_API ASD:HOME_METHOD_45(X_AXIS,1000,100000,0,0,0)
建立座標系後,我們已知位置B相對於原點為40 cm,故設定絕對位置為 4000000 PUU (μm)使其移動至位置B。
