凸轮对位 是 ASD-A2 电子凸轮裡一个很重要的功能,应用领域非常广,凡是要感测器做相位修正的场合皆适合, 例如:产品标记修正,机构误差修正,累积误差修正等等,其系统架构如下图所示:
台达A2 凸轮对位 的 系统架构:
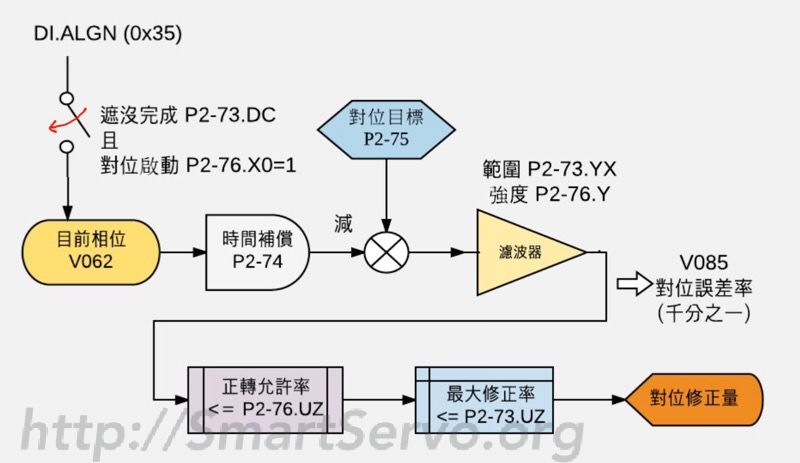
图(一) 凸轮对位架构图
本文介绍的 凸轮对位是由 DI.ALGN(0x35)所触发,功能由 P2-76.X0=1 开启,原理是将 DI.ALGN ↑ 当时的凸轮相位与目标值比较,并根据误差计算出修正量,提供给指定的 PR 来做修正,各功能区块介绍如下:
- 遮没范围:DI.ALGN 每次触发后,必须经过 P2-73.DC 指定的週期(单位是 % ),才会再度承认此 DI 信号!在范围内的 DI 变化是不被承认的,如此可以避免感测器的误信号,一般建议遮没 80%,因此 P2-73.DC = 0x50 (16 进制)
- 目前相位:目前凸轮所在的相位 可由 监视变数 V062 观察得知.单位是主轴脉波,(P5-84/P5-83) 表示=> 360 °
- 时间补偿:由于 DI 与 感测器 均有延迟,会造成取到的当前相位落后,因此必须补偿,以还原真实的相位,建议值为:
- 对位目标:DI.ALGN ↑ 当时的理想相位,由使用者输入 P2-75.单位是主轴脉波,(P5-84/P5-83) 表示=> 360 °.注意:本参数没有断电保持功能!
- 滤波器:将 对位误差 做平均,以抑制 感测器杂讯造成的对位修正量跳动,使对位更稳定!使用滤波的时机为 -> 标记是等距离出现才适用!
滤波的作用范围: |对位误差| <= P2-73.YX(%),否则不做滤波 [注 1]
滤波强度:P2-76.Y = 0(不滤波),1,2,3(数字愈大,效果愈缓和,建议勿超过 3)
- 监视变数 V085:滤波后的 对位误差率,单位是千分之一周期,若显示 10 表示为 1 %,换算角度为 => 360 ° × 1 % = 3.6 °
- 正转允许率:P2-76.UZ 可用来指定修正的方向,因为凸轮是週期性的,若有 +90 度 的误差需修正,可以 正向修 90度,也可以反向修 270度.P2-76.UZ 定义为 正方向修正 的 最大误差率(%).举例而言,若设定 UZ = 0x46(70 %),当次误差若为 40%,因小于 70%,就会往正方向修;反之 若当次误差为 80%,因大于 70%,所以就会往负方向修.常用的设定为:
- P2-76.UZ = 0x32: 50%,最短距离修正
- P2-76.UZ = 0x64:100%,一律往正方向,需配合最大修正率限制,否则可能一次修正太大!
- P2-76.UZ = 0x00: 0%,一律往反方向,需配合最大修正率限制,否则可能一次修正太大!
- 最大修正率:P2-73.UZ 用来限制每次修正的最大比例(%),以免修正过于剧烈使机台震动!例如 P2-73.UZ = 0x0F(15%),若当次误差超过 15% ,最多也只能修正 15%,剩下的误差则由下次对位 继续修正之!
- 对位修正量:经过前面层层过滤后得到的修正量,再由 P2-73.BA 指定的 PR 来执行它!此 PR 的设定方式 请参考 A2 凸轮对位-PR 设定
接着 再次提醒 P2-76.X2(反式对位)的设定必须正确:
- 标记位于主轴:用 标准对位,设定 P2-76.X2 = 0
- 标记位于从轴:用 反式对位,设定 P2-76.X2 = 1
参考资料:A2 凸轮对位-(1)概述,A2 凸轮对位-(3)PR 设定.
[注 1] 滤波范围 的设计是:误差小于此范围才做滤波,用意是让 大范围的误差可以快速修正到位,而稳定后,滤波又能使修正缓和,有助于提升精度!例如,当使用者将 对位目标 P2-75 改变很多时,通常希望能在2~3周内修正完毕,但若有开启滤波,可能会到10周以后才修完,太浪费时间!如果让使用者依需要自行开关滤波又很麻烦,因此设计 滤波范围 来自动判别,大的误差就不滤波,以节省修正时间,小的误差 视为感测器杂讯,做滤波可增加稳定性,一举二得!