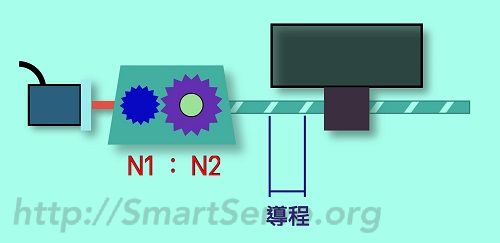
本文针对 丝杆(螺杆)机构 提供伺服驱动器 电子齿轮比 的公式推导,决定齿轮比的原则是:先决定 位置单位 PUU(Pos of User Unit),必须要方便观察,通常 PUU = 1~10 µm,依此计算出对应的齿轮比,而不是先决定齿轮比,再算出一个 PUU 是多少的长度,否则就是自找麻烦了(原因请参考 PUU 观念说明),首先说明符号定义:
- 1 mm 对应的 PUU数(P):PUU为 使用者单位,或 PLC 脉波单位
- 机械的减速比(n1 : n2):减速时 n1 <= n2,
- 螺杆圈数单位(REV):大写
- 马达圈数单位(rev);小写,rev = REV ×(n2/n1)
- 螺杆的导程(Pitch):螺杆转一圈机械移动的距离(mm/REV)
- 编码器解析度(R):编码器一圈的 PLS 数(PLS/rev )
- 电子齿轮比(Num/Den):PUU 脉波数 经 齿轮比 放大 得到 PLS 脉波数
电子齿轮比的公式推导:
根据齿轮比的定义,(PUU)乘以 电子齿轮比(Num/Den),就得到编码器脉波单位(PLS),即:
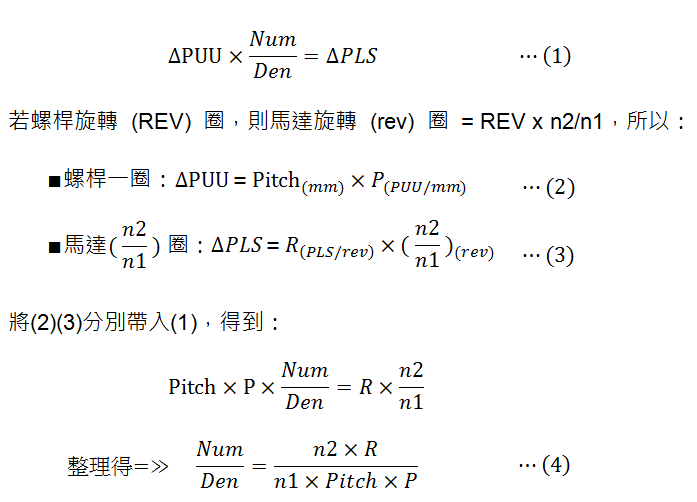
(4)式即为 电子齿轮比 的计算公式!接着推导模拟资讯:就是先假定 机械的线速度 为 V(mm/sec),分别求出当时的 马达转速 与 控制器下达的 命令脉波频率,以及 马达一圈的 PUU 数,如下所示:
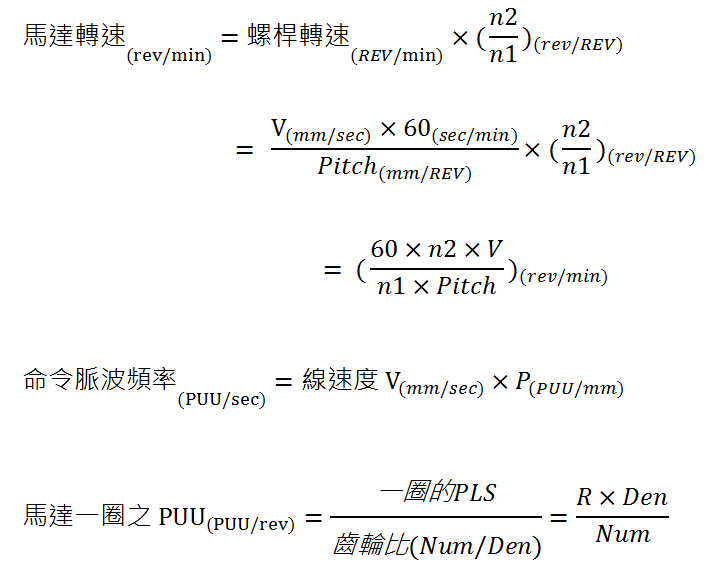
计算 电子齿轮比 其实不难,但还必须检查 在要求的机械线速度下,马达的转速不可超过它的规格,控制器的脉波频率也必须足够快 [注 1],否则这一组参数就不能用,必须重新设计 例如更改减速比,螺杆导程,或是重做马达与控制器的选型.这个过程可能会反复好几次,利用本站的 螺杆机构 齿轮比 自动计算工具 可以帮助您节省一些时间!另外,马达一圈的 PUU 数,尽量不要太低(建议大于 5000),否则马达运转起来会有顿挫感,不够平滑,转速愈低时会愈明显!
[注 1] 这是採用实体脉波的控制器才有的限制,例如某 PLC 的脉波输出频率最快可能为 500 KHz,就必须检查是否满足!若是採用 通讯控制 或是 本身具备路径规划能力的 智能伺服 就没有这个问题了!