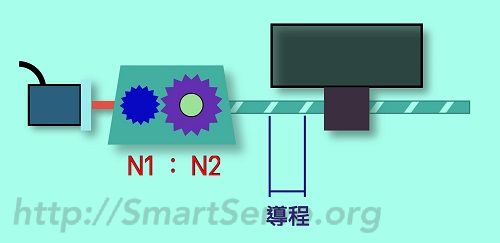
本文針對 螺桿機構 提供伺服驅動器 電子齒輪比 的公式推導,決定齒輪比的原則是:先決定 位置單位 PUU(Pos of User Unit),必須要方便觀察,通常 PUU = 1~10 µm,依此計算出對應的齒輪比,而不是先決定齒輪比,再算出一個 PUU 是多少的長度,否則就是自找麻煩了(原因請參考 PUU 觀念說明),首先說明符號定義:
- 1 mm 對應的 PUU數(P):PUU為 使用者單位,或 PLC 脈波單位
- 機械的減速比(n1 : n2):減速時 n1 <= n2,
- 螺桿圈數單位(REV):大寫
- 馬達圈數單位(rev);小寫,rev = REV ×(n2/n1)
- 螺桿的導程(Pitch):螺桿轉一圈機械移動的距離(mm/REV)
- 編碼器解析度(R):編碼器一圈的 PLS 數(PLS/rev )
- 電子齒輪比(Num/Den):PUU 脈波數 經 齒輪比 放大 得到 PLS 脈波數
電子齒輪比的公式推導:
根據齒輪比的定義,(PUU)乘以 電子齒輪比(Num/Den),就得到編碼器脈波單位(PLS),即:
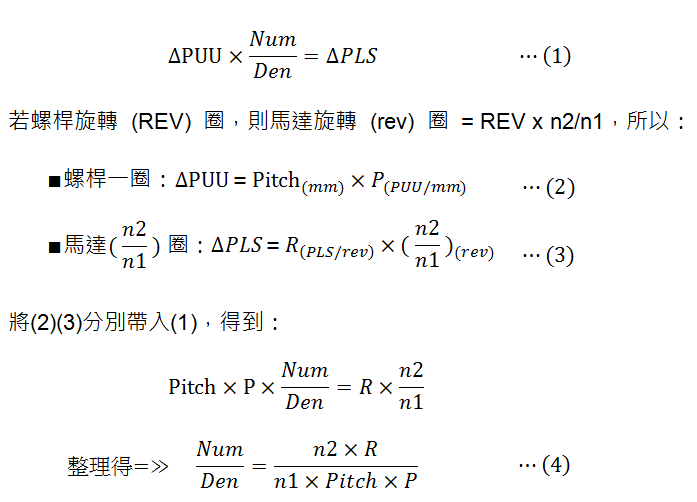
(4)式即為 電子齒輪比 的計算公式!接著推導模擬資訊:就是先假定 機械的線速度 為 V(mm/sec),分別求出當時的 馬達轉速 與 控制器下達的 命令脈波頻率,以及 馬達一圈的 PUU 數,如下所示:
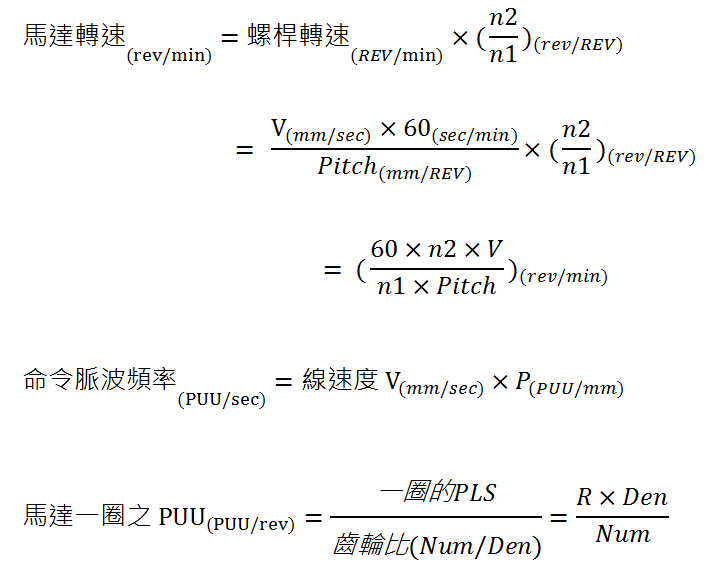
計算 電子齒輪比 其實不難,但還必須檢查 在要求的機械線速度下,馬達的轉速不可超過它的規格,控制器的脈波頻率也必須足夠快 [註 1],否則這一組參數就不能用,必須重新設計 例如更改減速比,螺桿導程,或是重做馬達與控制器的選型.這個過程可能會反覆好幾次,利用本站的 螺桿機構 齒輪比 自動計算工具 可以幫助您節省一些時間!另外,馬達一圈的 PUU 數,盡量不要太低(建議大於 5000),否則馬達運轉起來會有頓挫感,不夠平滑,轉速愈低時會愈明顯!
[註 1] 這是採用實體脈波的控制器才有的限制,例如某 PLC 的脈波輸出頻率最快可能為 500 KHz,就必須檢查是否滿足!若是採用 通訊控制 或是 本身具備路徑規劃能力的 智能伺服 就沒有這個問題了!