根据文章 “A2 凸轮对位-(2)系统架构” 所述,对位修正 必须由指定的 PR 来执行,此 PR 设定方式为:
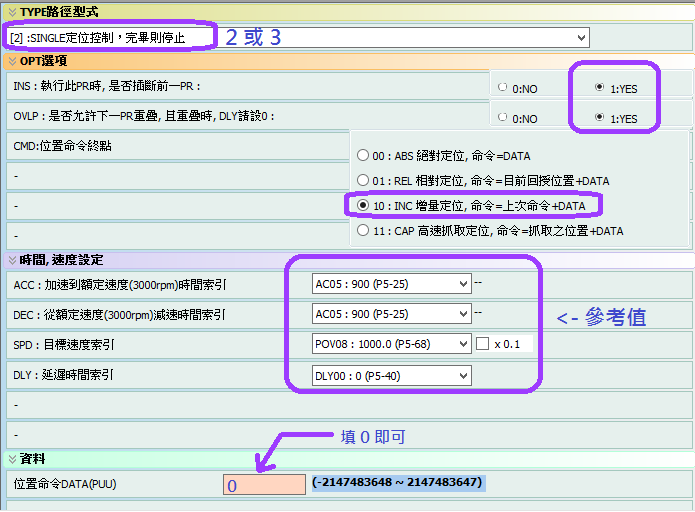
- PR 号码=?
- PR 路径形式必须为 2 或 3 (定位控制)
- 命令为 增量定位
- 插断(INS) 须勾选,避免因前次 PR 未结束而等待
- 重叠(OVLP)须勾选,避免 PR与凸轮 命令重叠后发生反转
其馀请参考下图:
参考:A2 凸轮对位-(1)概述,(2)系统架构.
根据文章 “A2 凸轮对位-(2)系统架构” 所述,对位修正 必须由指定的 PR 来执行,此 PR 设定方式为:
其馀请参考下图:
参考:A2 凸轮对位-(1)概述,(2)系统架构.