直线凸轮 看似平凡无奇,实际上的应用却不少,请参考 连结.本文将介绍用 ASDA-Soft 建造 “直线凸轮表” 的方法,对 ASD-A2 与 ASD-M-R 系列伺服皆适用!(ASDA-Soft V5 软件下载请点 这裡)
ASDA-Soft 建造 直线凸轮表 的流程:
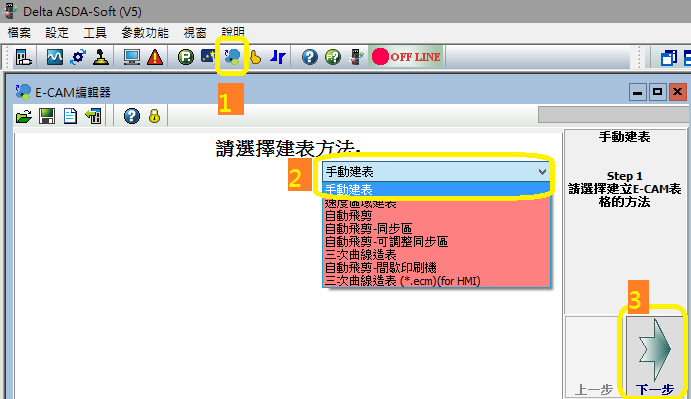
开启 ASDA-Soft 软件后,请依上图顺序操作:
- 点选工具列 E-CAM 电子凸轮 按钮
- 选择 建表方法 - 手动建表
- 点选 下一步,进入下图画面:
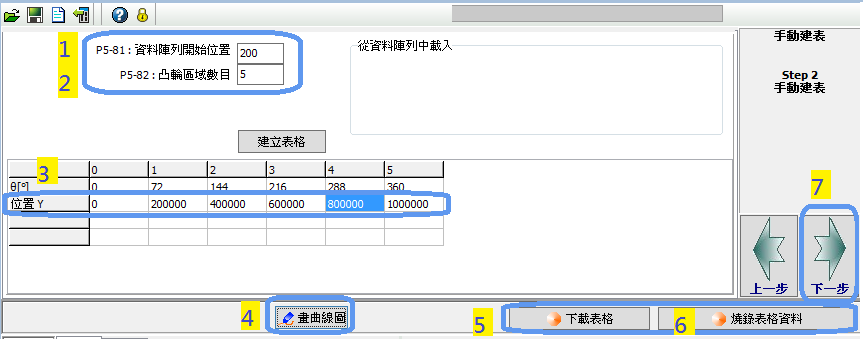
接着 依上图顺序分别输入:
- P5-81:凸轮表储存在资料阵列的开头位址,不要与 CAP/CMP 使用区域重叠.
- P5-82:设为 5 即可!表示为5区,6个点.因为是直线,不需要太多点也不会丧失精度!
- 表格内容:分别输入 0,20万,40万,60万,80万,100万.(单位是 PUU)
- 画曲线图:按下后即可看到 直线的凸轮曲线!
- 下载表格:将表格存入 伺服驱动器 的记忆体中![注 1]
- 烧录表格资料:可避免断电后凸轮曲线消失!仅 A2 需要烧录 [注 2] ,M-R 不需要!
- 按”下一步”:继续设定资料
[注 1] 下载凸轮表时,若凸轮在啮合状态会有错误讯息!请 Servo Off 或设 P5-88=0 来关闭凸轮.
[注 2] 烧录凸轮表时,伺服必须 Servo Off 才不会有错误讯息!可利用 ASDA-Soft 软件的 数位 IO 控制功能,将 Servo ON 的 DI 强制关闭即可! ASD-M-R 凸轮表储存在 DH 区 本身具备断电保持功能,不需要执行烧录动作!
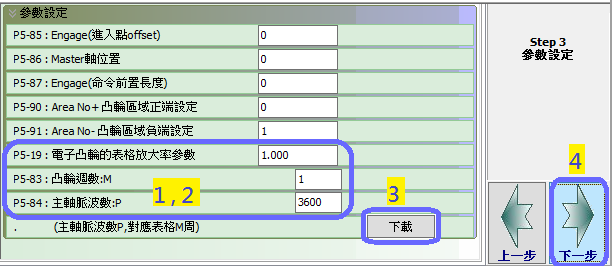
本画面主要设定的资料为:
- P5-83 与 P5-84:表示收到 P5-84 个主轴脉波,凸轮运转 P5-83 周 ,见下图 [注 3]
- P5-19:凸轮表格资料的放大倍率,单位是 0.000001 倍,即 P5-19=1百万时,表格放大1倍!画面中 P5-19 数值 = 1.0 会被 ASDA-Soft 乘以1百万再储存到参数 P5-19 中,若使用通讯(HMI 或 PLC)读写 P5-19 时请记得数值1百万 表示 1.0 倍!
即: P5-19 (参数实际数值) = p5_19 (软体显示数值) × 1000000
[注 3] 这表示 收到(P5-84/P5-83)个主轴脉波,凸轮运行一週(3600),若数值整除,可设定 P5-83 = 1.
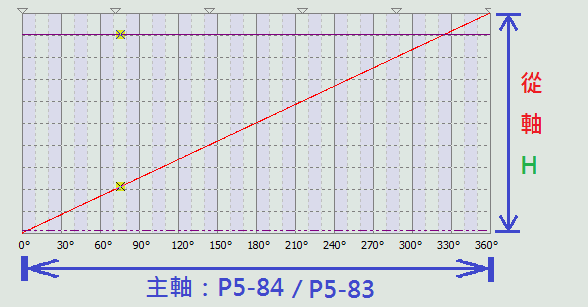
图中 H 为 “表格高度”,定义如下:
H = 表格最末点资料 – 第一点资料
= 1,000,000 – 0
= 1,000,000 (单位是 PUU)
凸轮运行一週 从轴行走的距离 L = ?
L = H × p5_19 (软体显示数值)
=1,000,000× P5-19 (参数实际数值) /1,000,000
= P5-19 (参数实际数值) (单位是 PUU)
因此,只要建表时,把 H 设为 一百万,凸轮一周 从轴运行距离刚好就是 P5-19 个 PUU,是不是很方便呢?例如:枕式包装机包装袋长 L = 115 mm,若定义 PUU = 1 µm,则 P5-19 (参数实际数值) = 115000,软件 ASDA-Soft 则为 p5_19 (软体显示数值) = 0.115
- 按”下载 “:将参数储存至驱动器.
- 按”下一步”:设定凸轮操作条件!
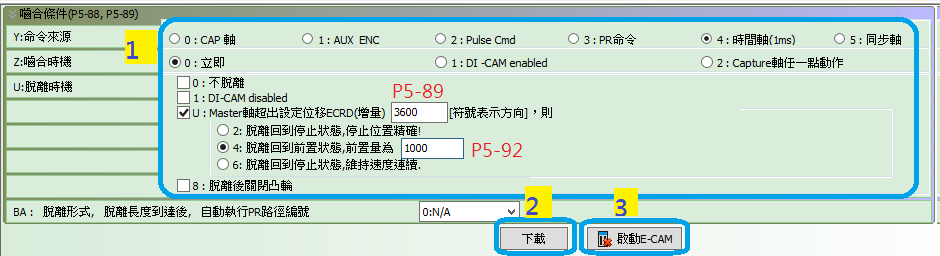
此时 直线的凸轮表已经建造完成,如要更改长度只需修改 P5-19 即可,不必修改表格的内容!而修改后的生效时机请参考 此篇.接着可以实际测试让凸轮跑起来,请先将伺服 Servo ON,再依下图1,2,3顺序设定,凸轮就可开始运转,图中的设定会使 凸轮每 3.6 秒运行一周(L = 1000000 PUU)[注 4],然后停止 1 秒再继续,周而復始不停止 [注 5] !若要停止凸轮可以再按下3.
参考:ASDA-Soft 凸轮造表-梯形,凸轮曲线应用-(2)梯形,PUU 单位说明.
[注 4] 主轴选择 时间轴,其脉波为 1 ms 发送 1 个脉波,且由于 P5-88.U=4,P5-84 = P5-89 = 3600,表示 3.6 秒凸轮运行一周 就进入前置状态,又因为 P5-92 = 1000,表示 1 秒后再重新啮合!
[注 5] 由于直线凸轮没有加减速规划,速度随时与主轴保持线性关係,而主轴(时间轴)也是固定频率,因此凸轮一啮合就马上到相应的速度,所以会有震动的情形,P5-19 愈大则愈明显!这类的运动通常会用 “速度区域建表法“,可规划加减速,就能避免这个问题!