机械设计中,通常会藉由传动元件(例如齿轮,皮带,链条,螺杆… 等等),将动力传递到机械末端来工作。然而,由于传动机构的挠性,背隙 … 等因素,会对机械的精度有不良的影响!本文提供一种量测 “传动误差” 的方法,不需要昂贵的仪器就可以做到 …
原理概述:
如下图,轴 A -> 轮 B 之间有许多传动元件:
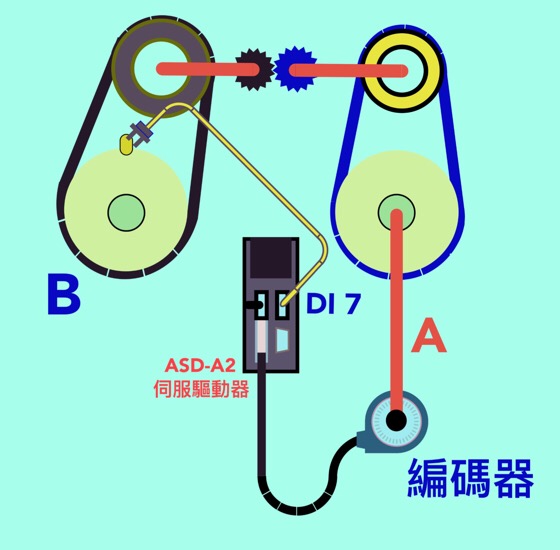
图(一)传动精度检测架构图
若想瞭解 轴 A -> 轮 B 之间的传动误差有多大,可以用 感测器 侦测 轮 B 上的标记,并将 轴A 连接一编码器,然后令机构旋转,抓取相邻二次感测标记之间的 编码器脉波 变化量,就可得知机构的 传动误差值,请参考示范影片(採用台达 A2 伺服的 同步轴功能 [注 1]):
优酷:
Youtube 影片請至右上角繁體版網頁觀看…:
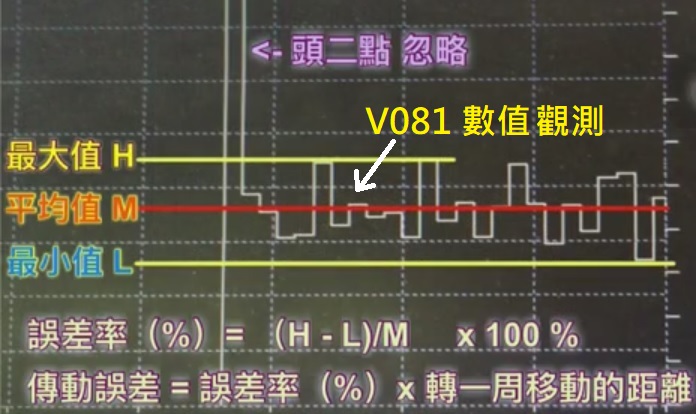
传动误差 的计算:
如果传动机构是完美的刚性体,则每次抓到的 编码器脉波增量(V081 变数)应该都是固定的数值,不会有变化,顶多是感测器的杂讯,通常在+/- 1 脉波以内,而刚性愈差的机构所得到的 V081 数值,则跳动愈剧烈!传动误差的计算公式如下:
在运动控制实际应用中,常见的状况是:伺服马达走的很准(追随误差都很小),但机械最终的效果却不理想!利用本文的方法可以帮助釐清机械传动精度是否太大了?对于问题查找会有一定的帮助!上图(一)的架构看似複杂,但通常 轴A 的编码器 用伺服马达本身的就可以了,不需要另外安装.影片中採用 磁铁+螺丝 作为 感测标记 是为了安装方便,如果机构本身已有凸出的螺丝 也可以直接使用.如果测出的 传动误差 在容许范围内 可以不必理会,否则就必须加以补偿,常见的的方法有:驱动器全闭环,感测器抓取位置做修正,凸轮对位 … 等等.
[注 1] A2伺服的设定可参考 “同步轴 的设定方法“,其中 P5-78 需设为 轮 B 转一圈,轴A 编码器 输出的 理论脉波数。