定长送膜(或送纸)常用于 横切机/糖果扭结包装机,是 电子凸轮 的典型应用,工艺简而言之 就是:主轴在某一角度范围时(切刀张开)送膜走一段长度,其馀角度范围时(切刀闭合)送膜停止,由于伺服会频繁的 启动与停止,适合採用 三角形凸轮曲线,有 标记对位 的需求.本文提供台达 A2-M 伺服的 “定长送膜” 范例档案,包括 凸轮表 与 参数档(含 PR 程序),读者可依照本文的说明,迅速将范例执行起来,藉以理解此应用的工作原理与使用方法!动作效果 可参考 => 定长送膜 影片,系统架构图如下:

安全须知:
为了避免 在方案不熟悉时操作造成危险,强烈建议:使用本范例时,伺服马达 先不要连接 机械,(可将连轴器拆除),等充分理解范例内容,并已根据自己的 机械配置 修改过相关参数后,再将伺服连上机械,以策安全!
范例 使用流程说明:
- 下载 专案档(A2_ECAM_Feed2Length.zip),并解压缩.载点:Dropbox,iCloud
- 利用 ASD-Soft 将 凸轮表(xxx.ECD)下载至 A2,并执行烧录,避免断电后资料消失!
- 利用 ASD-Soft 将 参数档(xxx.PAR)下载至 A2,再 重新上电 即可!
本范例主轴 是 切刀轴 的编码器,从轴为 伺服控制的 送纸辊,也就是本范例的 控制对象,为了方便演练,凸轮主轴 预设为 时间轴 [注 1],表示不必连接主轴 编码器,一旦凸轮啮合后 伺服便会开始运转,凸轮行程预设为 伺服转 1圈,初次演练时,再次提醒:务必将 伺服马达 与 机构 分离。
定长送纸 DIO 功能定义:
范例的 DI 与 DO 定义如下图所示,为了安全考量,DI8 预设为 紧急停止(B 接点),若确认伺服未连结到机构,可将之解除,方法可参考:A2 伺服快速入门-Q1.

当 A2 伺服 Servo ON 之后,收到 DI 3 命令 凸轮便启动,再收到 DI 6 信号 凸轮就啮合,伺服开始送纸动作,如此周而復始,DI 的功能说明如下:
- DI 1 伺服 ON:将 DI 1 ON 可使 伺服 ON!
- DI 2 异常清除:可清除 伺服的警报。
- DI 3 启动/停止:DI 3 Off => ON 触发 PR#51,执行凸轮启动的程序,须等待 啮合条件 DI 6 ON 才会啮合。ON => Off 触发 PR#55 强制脱离凸轮,衔接 PR#56 零速度命令,可设定停止的减速时间!
- DI 4 防空包 触发:DI 4 Off => ON 触发 PR#60,可让凸轮略过一周的命令,说明可参考:巨集 #10-防止空包.
- DI 5 标记对位:连接 侦测标记的 感测器,本范例预设有开启 P2-76 凸轮对位功能,对位目标由 P2-75 设定。
- DI 6 CAM_ON:此为本范例预设的 凸轮啮合条件,连接到 侦测主轴角度的 感测器。
- DI 7 同步轴信号:本范例的预留功能,预设未使用!若要使用同步轴,可将连接 DI 6 的信号改连到 DI 7,并把 控制凸轮启动之 PR#33 写入 P5-88 的资料 改成 0xC251 即可!
- DI 8 紧急停止:预设为 B 接点,导通时正常 ,断开时 Servo OFF 且报 AL.013!
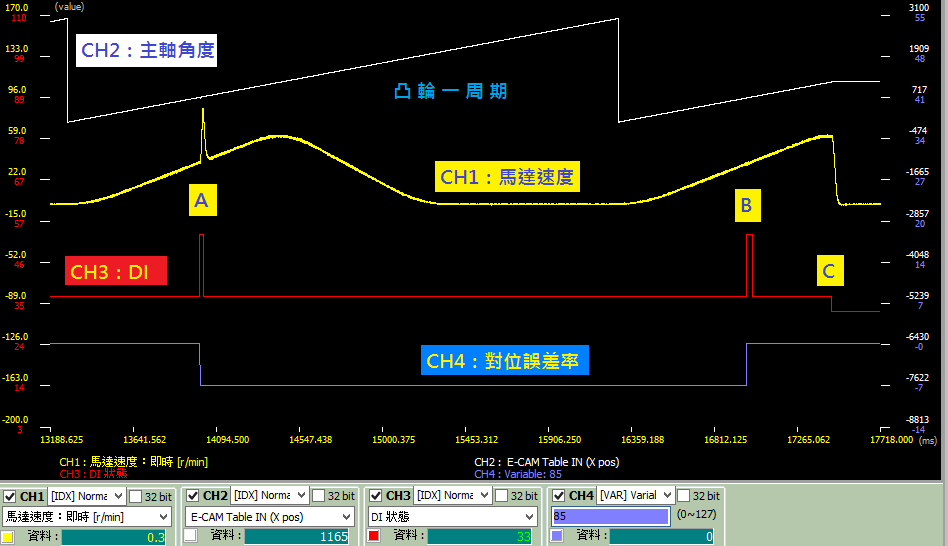
上图为本范例内附的 示波器档案(.scp),使用者可用 ASDA-Soft 软体的示波器视窗开启它,以节省设定 CH1 ~ 4 的时间.演练专案时,依序将 DI 1 => DI 3 => DI 6 ON,伺服就开始运转,应可看到上图的波型:
- CH2 主轴角度:由于脱离条件 P5-88.U=C,数值由 0 ~(P5-89-1) 代表凸轮啮合一周,然后归零,再继续下一周期.
- CH1 马达速度:採用 三角形曲线,因此图中速度为三角形,其中速度为零的区域 是 凸轮曲线建造的 停止区!
- CH3 DI 信号:
- 图中 A 点 DI 5 标记对位信号 ON,CH 4 立即改变,显示当次的 对位误差 [注 2];CH 1 马达速度 有一个突然变化 是 PR#10 的定位修正 与 凸轮命令 叠合 所导致的正常现象!(加减速由该 PR 设定)
- 图中 B 点 DI 5 再次 ON,因当次 对位误差为 0,所以 PR 修正量也是 0,CH 1 马达速度 就没有突变,表示对位已经准确,此瞬间 CH2 主轴角度 会很接近 P2-75 设定的目标值!
- 图中 C 点 DI 3 OFF 触发 PR #55 让凸轮脱离 并由 PR#56 减速停止!
- CH4 对位误差:每次 DI 5 对位信号 Off => ON 时,触发 凸轮对位修正,CH 4 显示对位误差率![注 2]
由于主轴为时间轴,主轴一周脉波 P5-84 = P5-89 预设为 3000 表示 3 秒钟 [注 1] 凸轮运转一周期!藉由 本范例的演练,希望有助于读者理解 定长送膜 的工作原理,然而,每个机台都有规格差异,因此范例需要调整一些参数,才能够符合实际的状况,请参考:A2 范例:定长送膜-(2)参数设定.
参考资料:ASDA-Soft 凸轮造表 =>三角形,凸轮(标记)对位,.
[注 1] 本范例 凸轮由 PR#33 设定 P5-88 =0xC141,表示 主轴 为时间轴.P5-83 = 1,P5-84 = P5-89 = 3000,P5-92 = 0 表示 3 秒 凸轮运转一周,周而復始!其中 伺服 运动与停止的 角度范围 由凸轮曲线控制!
[注 2] CH4 对位误差 显示 监视变数 V085,单位是 千分之一凸轮周期.