伺服驅動器 包含三個控制環(位置環 =>速度環 =>電流環).位置環 位於最外側,運算的輸出便是 速度環 的輸入.本篇提供台達 A2 與 M 系列驅動器 之 位置環架構圖(根據手冊資料彙整),用來呈現 位置控制 的典型配置 以及各種命令源通道的結構:除了傳統的 脈波控制(PT 模式)與 暫存器路徑(PR 模式)以外,也提供 智能伺服 特有的 二次開發平台(ezASD)與 位置環 的接入點,做為邁向 客製化設計 的基礎資料!(點選 圖中區塊 可連結更多說明)
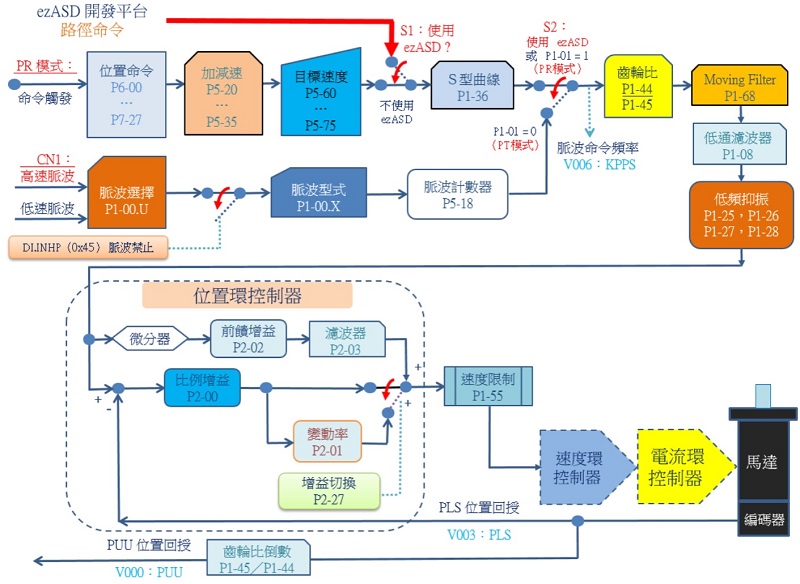
圖中各區塊說明如下:
位置環 的命令來源:由圖中 S1,S2(命令源)決定:
♦S1:是否使用 ezASD 二次開發平台?
- 使 用:則 位置命令 可透過平台的 運動指令 與 API 進行客製化設計
- 支援 ezASD 的機種目前有 M-R 與 A3(開發中)
- 不使用:則根據 S2,P1-01 決定:
- P1-01 = 0:為 PT 模式,位置命令來自 CN1 的 脈波輸入端子
- P1-01 = 1:為 PR 模式,位置命令由內部參數規劃產生
位置模式 的 命令種類:
- ezASD 平台:由使用者自行開發的運動程式來規劃命令!
- 模式設定:使用指令 MODE PATH 設定為位置模式
- 運動命令:提供 點對點,ECAM,直線/圓弧補間,PID 運算,DMCNET 網路控制 … 等
- S型曲線:由 P1-36 設定,單位 ms.設1則為 追隨誤差補償功能,無S型曲線!
- 電子齒輪比:只有一組,分子 P1-44/分母 P1-45.Servo ON 時分母不可修改!
- PR 模式:由內部參數來做命令的規劃,簡介如下:
- 路徑功能:回原點,點對點運動,電子凸輪
- 輔助功能:程序跳躍,寫入參數
- 觸發方式:DI POS0 ~ 5 + CTRG 觸發/事件EVn,寫參數 P5-07,特殊事件
- 路徑參數:位置(P6-00 ~ P7-27),加減速(P5-20 ~ P5-35),速度(P5-60 ~ P5-75)
- S型曲線:由 P1-36 設定,單位 ms.設1則為 追隨誤差補償功能,無S型曲線!
- 電子齒輪比:只有一組,分子 P1-44/分母 P1-45.Servo ON 時分母不可修改!
- PT 模式:位置命令來自 CN1 的 脈波輸入端子
- 脈波選擇:由 P1-00.U 選擇 高/低速 脈波通道
- 脈波型式:由 P1-00.X 選擇三種型式(0)A/B 相(1)正/逆向(2)脈波+方向
- 脈波計數:由 P5-18 可讀取脈波數量,也可寫入以歸零,但不影響命令數量,只是方便觀察!
- 脈波禁止:可由 DI.INHB(0x45)來禁止脈波命令,只在 DI8 才有作用.
- 電子齒輪比:共有四組,分子(P1-44,P2-60,P2-61,P2-62)/分母 P1-45,用 DI. GNUM0/GNUM1 來選擇
位置命令 的 濾波器:
- Moving Filter:P1-68, 同樣的濾波時間 比 低通濾波 有更平緩的效果!
- 低通濾波器:P1-08,做 追隨誤差補償 時 請務必關閉之.
低頻抑振 濾波器:含二組抑振參數,支援自動模式
- 第一組參數:P1-25(抑振頻率,單位 0.1 Hz),P1-26(抑振增益)
- 第二組參數:P1-27(抑振頻率,單位 0.1 Hz),P1-28(抑振增益)
- 控制參數 :P1-29(自動抑振模式設定),P1-30(檢測準位)
位置控制器 包含的增益:
- 前饋補償:P2-02 (前饋增益),P2-03(前饋濾波)
- 比例增益:P2-00
- 積分增益:P2-53,預設值為0(不作用),手冊圖中未標示但其實存在
- 增益切換:當指定的條件發生,自動切換增益的值 或 取消積分控制!
速度限制參數:
- P1-55:位置環輸出 經此限制後才進入 速度環
- 預設值不大(依馬達型式),通常為額定轉速,非最高轉速
- 此數值不夠大可能導致 AL.009 發生,尤其瞬間需高轉速的應用!
回授狀態的監視變數:
- 回授位置:V000,單位是 PUU(使用者單位)
- 回授位置:V003,單位是 PLS(編碼器脈波單位)
參考資料:速度環 控制架構圖,電流環 控制架構圖
相關文章/Related Posts: