本文針對常見的 螺桿機構 提供一個工具程式,以便快速求出伺服的 電子齒輪比,並提供額外的模擬資訊,來評估各項 系統參數 是否合理.使用步驟如下:
- 輸入 使用者單位(PUU)與 機械單位 的關係
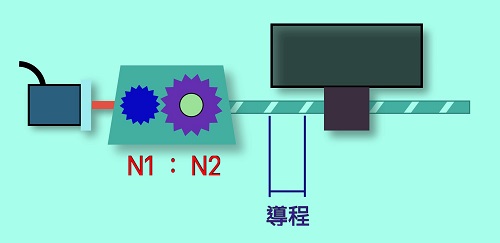
- 輸入 機械的 減速比(無減速時為 1:1)
- 輸入 螺桿的 導程(螺桿轉一圈 機械移動的距離)
- 輸入 編碼器一圈(PLS)數,即電子齒輪比 1:1 時,要收到多少(PUU)伺服才會走一圈!
- 按下 “計算齒輪比” 即可得到 分子:分母 的數值
- 輸入 機構移動的 線速度 來檢視 模擬結果 是否合理?
當輸入了 機械的線速度後 模擬資訊 便會顯現,各欄說明如下:
- 對應 馬達轉速:不可超過馬達最高速度,若超過請 減小減速比,或增加導程.
- 命令 脈波頻率:必須小於上位機(PLC)的最高脈波頻率(否則上位機發送的脈波無法達到要求的線速度),若超過請修改 PUU 單位 來加大 電子齒輪比!如果伺服命令來自驅動器本身(例如台達 ASD-A2)則可忽略此項訊息.
- 馬達 一圈 PUU 數:最好不要小於 5000,以免馬達運轉不夠平順,轉速愈低則愈明顯!縮小 電子齒輪比 可改善之.
本工具使用若有任何問題請於下方留言,公式來源請參考 齒輪比公式推導!
您好,有兩個問題想要請教,再麻煩您了,謝謝。
1. 為什麼馬達 一圈 PUU 數:最好不要小於 5000,是什麼原因導致馬達運轉不夠平順?
假設
機 械 單 位 :mm =10000 PUU、N2 =5、機械線速度 =1000mm/分鐘時(其他參數為預設值),依照您線上計算出來的值馬達一圈 PUU 數 =2000puu/rev。
2. 請問這個狀況下要如何改善?
當馬達每轉PUU數太小,低速時,命令脈波頻率會很低,例如頻率 < 1KHz時,命令每1ms有時有脈波,有時則無,表示馬達處於走走停停的狀態,導致頓挫感,你可以試試在此狀態,觸碰馬達外殼,應該能夠感受到。但這並不一定會有嚴重的問題,也許你的應用並不會在如此低的轉速,且具有5倍減速機,馬達端的頓挫傳到機構端也會被減弱5倍,只要頓挫能夠接受就無所謂,除非是CNC類的應用才會更要求,若是一般點對點運動則影響不大。 雖然可以讓1mm=?PUU更細,但可能讓機構的極速不夠快。如網頁模擬資訊中,需滿足的優先順序是1,2,3,前2項必須保證滿足,第3項(馬達每轉PUU數)是排在最後,不需要為了滿足第3項而犧牲前2項!你的現況 2000 PUU/Rev 也不算太差,5000只是參考值,有些人 500 PUU/Rev 也在用,主要是機械低速時的頓挫感能夠接受就好,如果還希望改善,可以降低伺服增益或加大濾波(台達伺服可增加P1-68)。
打擾了,請問有線下版的計算軟件嗎?
抱歉,目前只有網頁版的喔!
谢谢问题已解决
为什么没有办法输入数据了
您是使用手機連線嗎?若是的話請按畫面最下方的”檢視完整網站”,請再試試,謝謝!