A2 DI 功能 雖不複雜,但初學者若想快速進入狀況也不容易,因為手冊中的資料比較分散.常遇到的問題有:
- 如何設置每個DI腳位的功能 與 A/B接點?
- 如何採用 通訊方式 來控制 DI
首先必須先了解,每個DI對應的參數位置:
接著,可以看這張架構圖:
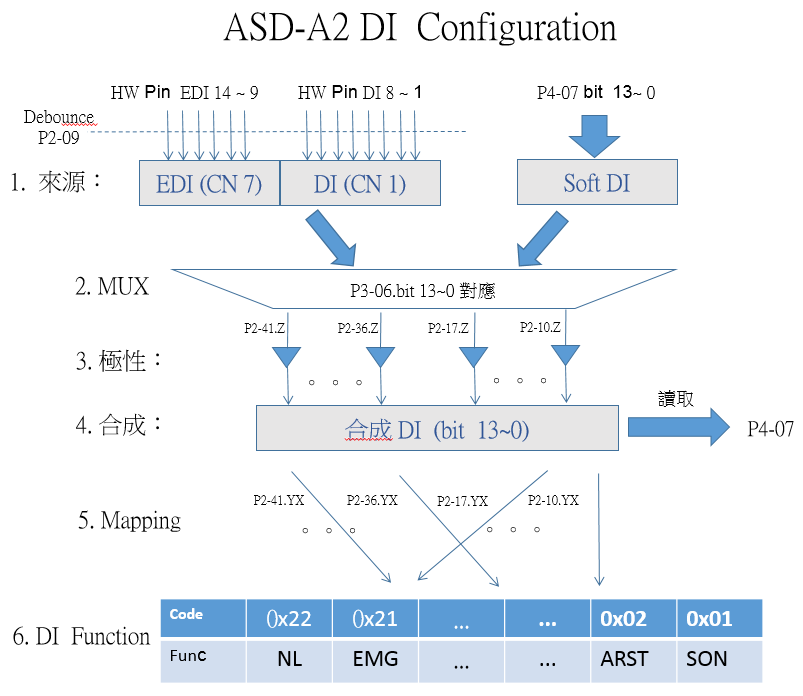
1.來源:左半邊來自硬體的腳位,包含 DI 1~8 與 EDI 9~14 (A2-U機種才有).共 14 隻腳.右半邊來自參數 P4-07 的 Bit 0 ~ 13,同樣 14 個信號.左邊的硬體信號在採集時,會先經過 Debounce 的過程(由 P2-09 設置),來抑制信號 On/Off 切換時的彈跳現象.
2.MUX(選擇信號來源):雖然有 硬體 與 參數 共28個信號,但A2伺服只支援 14 個信號源,所以每個信號必須選擇來自硬體或來自參數.選擇的方式為透過參數 P3-06 的 Bit 0 ~ 13(依序對應 DI 1~14),Bit 設為0時來自硬體信號;設為1時來自參數 P4-07.
3.設定極性:選擇好的 14 個信號,可以分別指定極性(A/B接點),DI 1 ~ 14 依序由對應參數的第三位(Z)來決定.Z=1為A接點(Normal Open);Z=0為B接點(Normal Close).一般而言,與安全保護有關的信號會設定成B接點(例如正反轉極限與緊急停止),信號斷線時才能得到保護!
4.合成DI:最終合成的DI,也可以由 P4-07 讀取觀察!
5.Mapping(映射):雖然 14 個 DI 都已經準備好了,但是功能還沒有選定.必須透過映射來指定,作法是把每個 DI 對應參數的一二位(XY),填入所需要 功能碼,就完成了!
6.DI Function:對A2的使用者來說,任務已經完成了,剩下的工作會由韌體自動完成!而 ASD-M-R 的使用者 可以從 MV 區看到這些 DI 的狀態,也可以透過 M-R 的 PLC 程式來 讀寫這區的 DI,因此不受硬體腳位數目限制.得以完整使用韌體所有的 DI 功能 !
介紹完 ASD-A2 的 DI 架構,使用者若想透過通訊的方式來控制 DI,應該知道怎麼做了吧!只要利用 P3-06 指定哪些 DI 來自參數,再用通訊讀寫 P4-07 就可以了!