| 異警 名稱 |
一次因 | ALM | WRN | SRV ON | 清除 方式 |
|---|---|---|---|---|---|
|
AL.015 正向極限異常 |
正向極限開關被按下時動作 | ⊗ | Yes | DI:ARST 清除或Servo Off 清除或脫離正向極限後自動清除 |
| 異警原因 | 檢查方法 | 排除方法 |
|---|---|---|
| 正向極限開關按下 | 確認 DI.PL(0x23) 開關位置 | 開啟正向極限開關 |
(以上資訊參考自台達電子 ASDA-A2 伺服驅動器使用手冊)
台達伺服驅動器
| 異警 名稱 |
一次因 | ALM | WRN | SRV ON | 清除 方式 |
|---|---|---|---|---|---|
|
AL.015 正向極限異常 |
正向極限開關被按下時動作 | ⊗ | Yes | DI:ARST 清除或Servo Off 清除或脫離正向極限後自動清除 |
| 異警原因 | 檢查方法 | 排除方法 |
|---|---|---|
| 正向極限開關按下 | 確認 DI.PL(0x23) 開關位置 | 開啟正向極限開關 |
(以上資訊參考自台達電子 ASDA-A2 伺服驅動器使用手冊)
<=所有警報列表 – 台達伺服 => 更多緊急停止功能說明,緊急停止功能列表
| 異警 名稱 |
一次因 | ALM | WRN | SRV ON | 清除 方式 |
|---|---|---|---|---|---|
|
AL.013 緊急停止 |
緊急按鈕按下時動作 | ⊗ | NO | DI EMGS 解除自動清除 |
| 異警原因 | 檢查方法 | 排除方法 |
|---|---|---|
| 緊急停止開關按下 | 確認 DI.EMGS(0x21) 開關位置 | 開啟緊急停止開關 |
(以上資訊參考自台達電子 ASDA-A2 伺服驅動器使用手冊)
| 異警名稱 | 一次因 | ALM | WRN | SRV ON | 清除 方式 |
|---|---|---|---|---|---|
|
AL.503 STO_自我診斷錯誤 |
STO 進行自我診斷時發生錯誤 |
⊗ |
|
No |
重新斷開電 |
| 異警名稱 | 一次因 | ALM | WRN | SRV ON | 清除 方式 |
|---|---|---|---|---|---|
|
AL.502 STO B 無訊號 |
STO_B 無訊號(訊號遺失或發生錯誤) |
⊗ |
|
No |
重新斷開電 |
| 異警名稱 | 一次因 | ALM | WRN | SRV ON | 清除 方式 |
|---|---|---|---|---|---|
|
AL.501 STO A 無訊號 |
STO_A 無訊號(訊號遺失或發生錯誤) |
⊗ |
|
No |
重新斷開電 |
| 異警名稱 | 一次因 | ALM | WRN | SRV ON | 清除 方式 |
|---|---|---|---|---|---|
|
AL.500 STO 功能啟動 |
安全功能(STO)被啟動 |
⊗ |
|
No |
DI.ARST 或0x6040.Fault Reset |
-參數設定")
本文 針對 “A2 範例:同步追蹤(1)-基本操作” 一文的內容,補充相關參數 的設定方法。由於每個機台的 尺寸,方向 與 減速比 配置都不同,因此範例檔無法直接套用,必須加以修改才能吻合現況,包括 同步速度匹配,追蹤距離,偏移量,拉回速度 … 等等,本文將逐一加以說明.
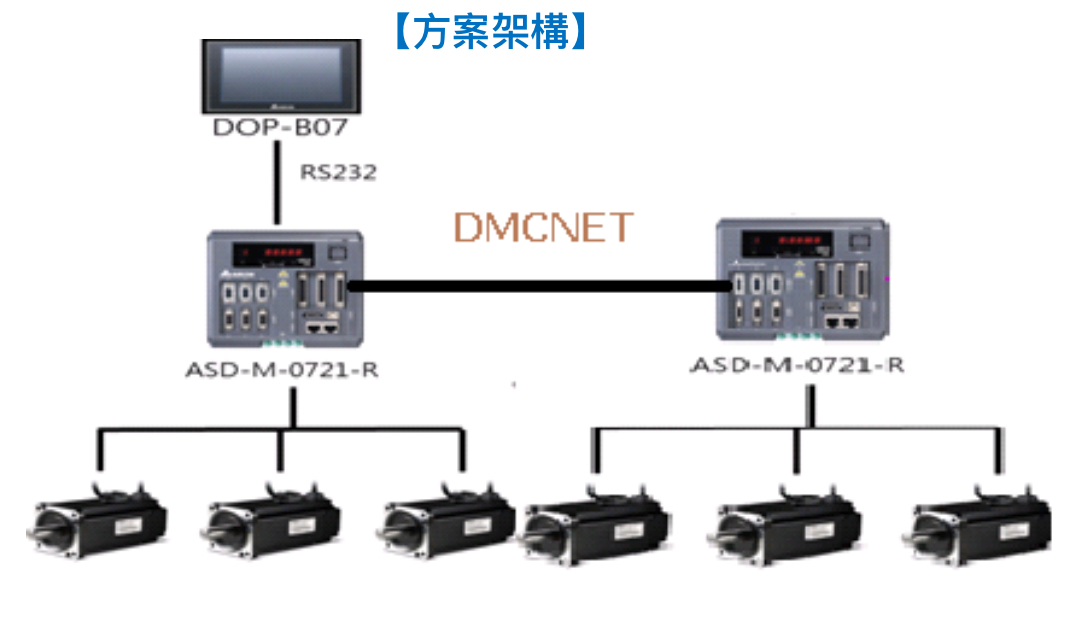
同步追蹤 也是一種常見的凸輪應用,其動作與 “追剪” 類似,都是要求從軸(伺服)的位置在工作時與主軸同步,差別是 “追剪” 主要用於連續料的定長切割,而 “同步追蹤” 則用於隨機料(也就是物品出現的時機不固定),因此啟動信號是根據感測器,觸發後只追蹤一次,設定的距離到達便自動回到起始位置,等下次觸發信號收到才會再次追蹤,常應用於流水線,例如 同步噴漆,瓶罐注料,物品夾取等應用.凸輪的主軸 通常是 送料軸編碼器,從軸為 伺服控制的滑台,本文提供台達 A2-M 伺服在此應用的專案檔,包括 梯形 凸輪曲線,參數檔(含 PR 程序),讀者可依照本文的說明,迅速將範例執行起來,藉以理解 同步追蹤 的原理與使用方法!
台達伺服的機種愈來愈多,參數 P2-08 也增加了一些新功能,似乎有必要彙整一下,以免常常記不清楚,茲整理如下:
最近一期的台達機電電子報(124期)有篇 M-R 理料的案例,詳情見 台達交流伺服驅動系統打造卓越理料線解決方案,實現高精高速食品包裝排列工序,