高速繞線機運用在繞 DC 無刷馬達的定子槽內繞機,產品包括:風扇、排風機、洗衣機、電動車等馬達…
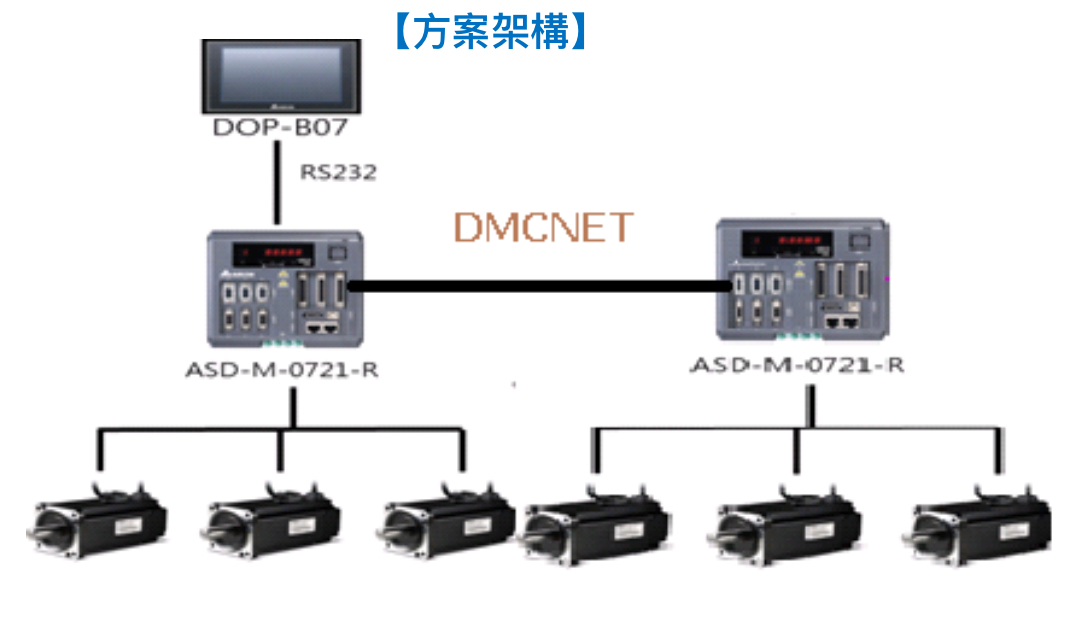
此方案使用台達 M-R 智能伺服系統,除了是三合一伺服驅動外,內建運動控制、邏輯控制並可外接 9 站裝置(種類:伺服、IO版…)。優越的運動控制不但可以精準的多軸同動、降低機械運作噪音、便利的步序(三次平台)編程大大降低了終端客戶更換工件的時間與麻煩。更多訊息=> 刚柔并济 驱控一体 台达M-R成就高速绕线方案
內含運動控制的伺服驅動

高速繞線機運用在繞 DC 無刷馬達的定子槽內繞機,產品包括:風扇、排風機、洗衣機、電動車等馬達…
此方案使用台達 M-R 智能伺服系統,除了是三合一伺服驅動外,內建運動控制、邏輯控制並可外接 9 站裝置(種類:伺服、IO版…)。優越的運動控制不但可以精準的多軸同動、降低機械運作噪音、便利的步序(三次平台)編程大大降低了終端客戶更換工件的時間與麻煩。更多訊息=> 刚柔并济 驱控一体 台达M-R成就高速绕线方案
最近一期的台達機電電子報(124期)有篇 M-R 理料的案例,詳情見 台達交流伺服驅動系統打造卓越理料線解決方案,實現高精高速食品包裝排列工序,


在 運動控制 的場合,選擇適合的 坐標系 是很重要的.不同的機械結構或應用,適合的坐標系也不同.本文針對常見的 直線 與 分度座標,加以說明其特性與適用場合.一般而言,機械根據末端形式可區分為二類:(1)有限行程,(2)無限行程,代表性的例子分別如下:
1,螺桿機構:二端有死點,行程有限,無週期性
電子齒輪比 計算工具 – 螺桿機構")
本文針對常見的 螺桿機構 提供一個工具程式,以便快速求出伺服的 電子齒輪比,並提供額外的模擬資訊,來評估各項 系統參數 是否合理.使用步驟如下: