凸輪對位 是 ASD-A2 電子凸輪裡一個很重要的功能,應用領域非常廣,凡是要感測器做相位修正的場合皆適合, 例如:產品標記修正,機構誤差修正,累積誤差修正等等,其系統架構如下圖所示:
台達A2 凸輪對位 的 系統架構:
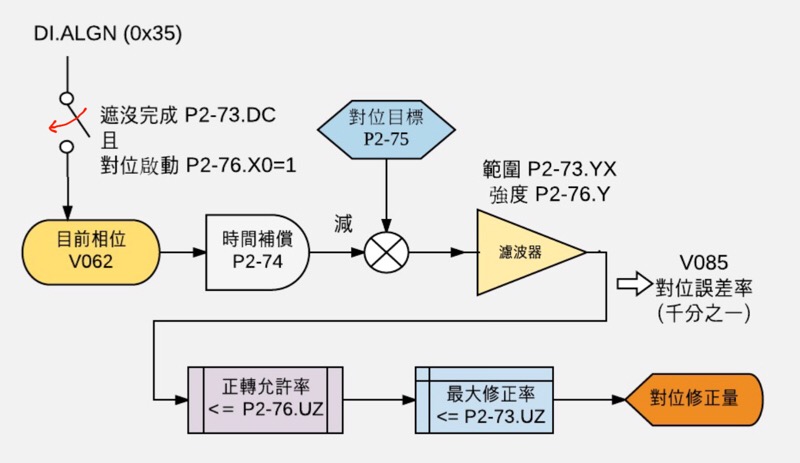
圖(一) 凸輪對位架構圖
本文介紹的 凸輪對位是由 DI.ALGN(0x35)所觸發,功能由 P2-76.X0=1 開啟,原理是將 DI.ALGN ↑ 當時的凸輪相位與目標值比較,並根據誤差計算出修正量,提供給指定的 PR 來做修正,各功能區塊介紹如下:
- 遮沒範圍:DI.ALGN 每次觸發後,必須經過 P2-73.DC 指定的週期(單位是 % ),才會再度承認此 DI 信號!在範圍內的 DI 變化是不被承認的,如此可以避免感測器的誤信號,一般建議遮沒 80%,因此 P2-73.DC = 0x50 (16 進制)
- 目前相位:目前凸輪所在的相位 可由 監視變數 V062 觀察得知.單位是主軸脈波,(P5-84/P5-83) 表示=> 360 °
- 時間補償:由於 DI 與 感測器 均有延遲,會造成取到的當前相位落後,因此必須補償,以還原真實的相位,建議值為:
- 對位目標:DI.ALGN ↑ 當時的理想相位,由使用者輸入 P2-75.單位是主軸脈波,(P5-84/P5-83) 表示=> 360 °.注意:本參數沒有斷電保持功能!
- 濾波器:將 對位誤差 做平均,以抑制 感測器雜訊造成的對位修正量跳動,使對位更穩定!使用濾波的時機為 -> 標記是等距離出現才適用!
濾波的作用範圍: |對位誤差| <= P2-73.YX(%),否則不做濾波 [註 1]
濾波強度:P2-76.Y = 0(不濾波),1,2,3(數字愈大,效果愈緩和,建議勿超過 3)
- 監視變數 V085:濾波後的 對位誤差率,單位是千分之一周期,若顯示 10 表示為 1 %,換算角度為 => 360 ° × 1 % = 3.6 °
- 正轉允許率:P2-76.UZ 可用來指定修正的方向,因為凸輪是週期性的,若有 +90 度 的誤差需修正,可以 正向修 90度,也可以反向修 270度.P2-76.UZ 定義為 正方向修正 的 最大誤差率(%).舉例而言,若設定 UZ = 0x46(70 %),當次誤差若為 40%,因小於 70%,就會往正方向修;反之 若當次誤差為 80%,因大於 70%,所以就會往負方向修.常用的設定為:
- P2-76.UZ = 0x32: 50%,最短距離修正
- P2-76.UZ = 0x64:100%,一律往正方向,需配合最大修正率限制,否則可能一次修正太大!
- P2-76.UZ = 0x00: 0%,一律往反方向,需配合最大修正率限制,否則可能一次修正太大!
- 最大修正率:P2-73.UZ 用來限制每次修正的最大比例(%),以免修正過於劇烈使機台震動!例如 P2-73.UZ = 0x0F(15%),若當次誤差超過 15% ,最多也只能修正 15%,剩下的誤差則由下次對位 繼續修正之!
- 對位修正量:經過前面層層過濾後得到的修正量,再由 P2-73.BA 指定的 PR 來執行它!此 PR 的設定方式 請參考 A2 凸輪對位-PR 設定
接著 再次提醒 P2-76.X2(反式對位)的設定必須正確:
- 標記位於主軸:用 標準對位,設定 P2-76.X2 = 0
- 標記位於從軸:用 反式對位,設定 P2-76.X2 = 1
參考資料:A2 凸輪對位-(1)概述,A2 凸輪對位-(3)PR 設定.
[註 1] 濾波範圍 的設計是:誤差小於此範圍才做濾波,用意是讓 大範圍的誤差可以快速修正到位,而穩定後,濾波又能使修正緩和,有助於提升精度!例如,當使用者將 對位目標 P2-75 改變很多時,通常希望能在2~3周內修正完畢,但若有開啟濾波,可能會到10周以後才修完,太浪費時間!如果讓使用者依需要自行開關濾波又很麻煩,因此設計 濾波範圍 來自動判別,大的誤差就不濾波,以節省修正時間,小的誤差 視為感測器雜訊,做濾波可增加穩定性,一舉二得!