M-R 的 ECAM/CAP/CMP 功能都是承接 A2 來,
主要與A2 的差別是所有來源(CN1脈波, CN5 輔助編碼器脈波, 主編碼器回授…)都有X, Y, Z軸可以選,
但最早的 M 系列設計這些功能塊都是只能使用本體軸的來源,不可以跨軸。
試想若有一個編碼器訊號要帶動三軸一起跑凸輪,那原來的功能就無法做到,
除非將編碼器訊號 Bypass 到每一軸去。
後來我們將 ECAM/CAP/CMP 的功能全部改成可以跨軸,為了與之前的功能做區分訂了 P1-19.U 來做切換。
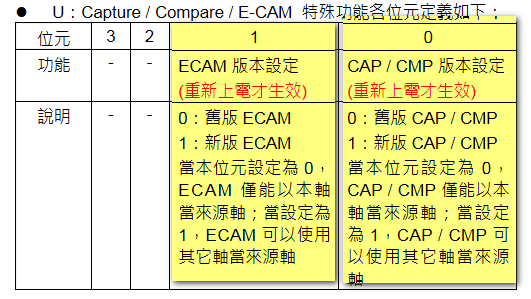
要特別注意一定要透過面板或通訊(HMI, AsdaSoft)設定P1-19.U為新版ECAM/CAP/CMP後重新上電才能生效,
不可以預期用程式修改就會生效!
LACCL 0x3000
SACC_PR 19,X_P1
主要的原因參數的儲存體是 EEPROM,而EEPROM 的寫入次數是有限的,
為了怕程式方案寫了一個無窮一直在改參數沒一會就會把EEPROM的壽命耗光,
所以程式中調用 SACC_PR 來改參數並不會寫入 EEPROM,(只是顯示的參數值已經修改)
而P1-19.U 是設定後要斷電後由 EEPROM 讀取設定值來決定要跑新版還是舊版,
若是 SACC_PR 修改的並沒改變 EEPROM 內容所以 P1-19.U就還是跑舊版,
但你看參數會發現 P1-19.U 已經是 3,會以為已經是新版。
這點要特別注意!
所以下次當你無法設定凸輪跨軸時,要記得到面板或通訊設定一下 P1-19.U後再重新開機。