使用 台達 ASD-A2 伺服 PR模式 的點對點命令(包括 絕對/增量/相對定位)時,有時希望在路徑中途改變 速度 或 位置,新的命令必須立即生效,而不等待前一命令執行完畢!作法說明如下:
兩段 PR 命令設定為:
先於(A點)觸發 PR#51,在執行途中(B 點)觸發 PR#53,以 ASDA-Soft 示波器抓取波型如下:
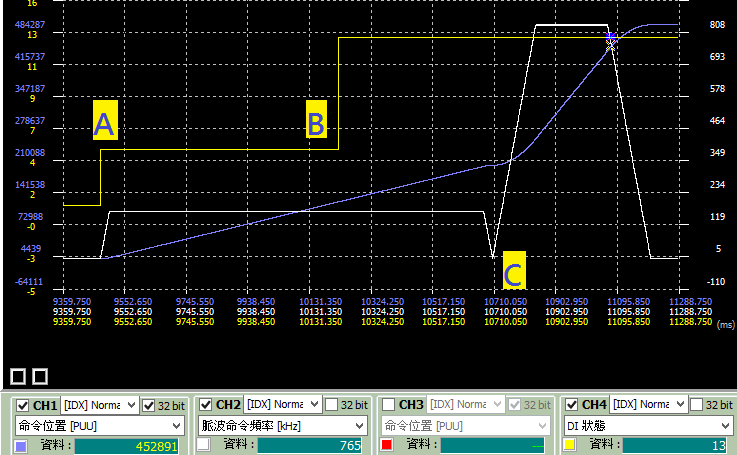
上圖中可看出,(B 點)觸發PR#53 ,並未立即執行,而是等到(C 點) PR#51 結束(速度降為0)才接著執行,明顯看出2段路徑是依序執行,並不符合我們的需求!示波器各資料說明如下:
- CH1(位置命令):PR 模式 位置命令 的輸出量(單位:PUU)
- CH2(脈波頻率):PR 命令每 1 ms 輸出的 PUU 數目,相當於 速度命令,即 CH 1 的微分!
- CH4(DI狀態):本例用 DI 的 事件 EV1 與 EV2 分別觸發二段 PR,觀察 DI 狀態 可知 PR 何時觸發!
中途改變速度 或位置,第二段 PR 必須勾選 “插斷 INS“
接著新增一個 PR#55 命令如下(與 PR#53 相比只多了 “插斷 INS” [註 1]):
- PR #55:增量定位 位置=200000 速度=500 rpm,勾選 插斷 INS
仍然先於(A點)執行 PR#51,在命令走到一半(B 點)時觸發 PR#55,示波器抓取波型如下:
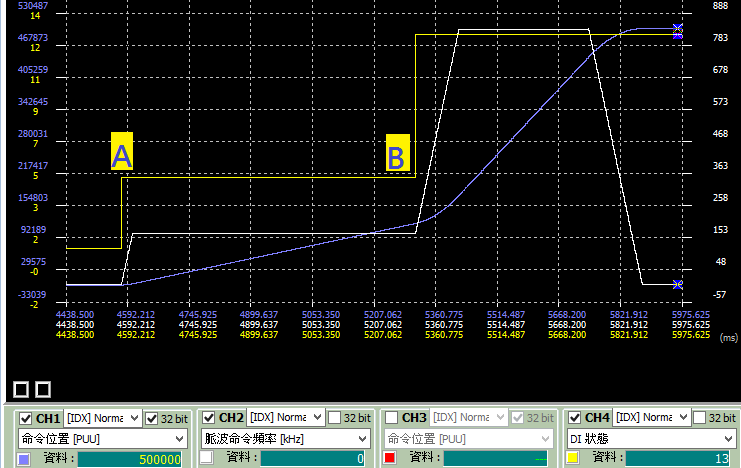
可以看出,(B 點)PR#55 觸發時,速度 CH2 就立刻改變,不像前次實驗中途速度降到0,因此滿足 前一命令仍在執行,也能立即改變 速度,位置,甚至 加減速 的效果了!如果只希望中途更改速度,不改變 終點位置 的話,只需更改 PR#55 的位置 DATA=0即可!
參考資料:PR 模式 絕對/增量/相對定位的差異 ,事件 DI 觸發 PR 定位命令
[註 1] 插斷(INS)的意思是:此命令一經觸發 便立刻執行,不論前一命令是否仍在執行!
那請問我修改的速度要丟入PR#55還是原來的PR#51
圖中B點觸發的是 PR#55,所以第二段速度就是 PR#55 的速度!