台達 A2 伺服的 PR 模式 具有豐富的 運動功能,也有多樣的 觸發方式:除了標準的 DI.POS 5~0 + CTRG 觸發外,也提供 事件觸發,參數 P5-07 觸發,特殊事件(CAP 完成/CMP 完成/ECAM 脫離)觸發 等靈活的使用方式,本文彙整所有觸發方式的相關資料,一一加以說明 …
標準 DI.POS 5 ~ 0 + DI.CTRG 觸發
- POS 5~0 分別表示 PR 編號的 2 進位編碼,DI 為 ON 時視為 1;否則為 0。請參考 =》PR 編號對應 POSx 編碼表
- 未配置的 DI.POSx,其狀態視為 0
- DI.CTRG(0x08) 上升緣觸發
事件 DI:EV1~4(0x39,0x3A,0x3B,0x3C) 觸發
- 上升緣,下降緣可指定觸發不同的 PR
- P5-98 指定 EV 1~4 上升緣 觸發的 PR #編號
- P5-99 指定 EV 1~4 下降緣 觸發的 PR #編號
- 只能 指定 PR #51 ~ #63,可利用 JUMP 跳躍至其他 PR
- 使用軟體設定較方便 => ASDA-Soft 事件觸發方式
專用 DI 觸發:
寫入 P5-07 = n,即可觸發 PR #n
- 寫入 0:回原點
- 寫入 1 ~ 63:觸發 PR #1 ~#63
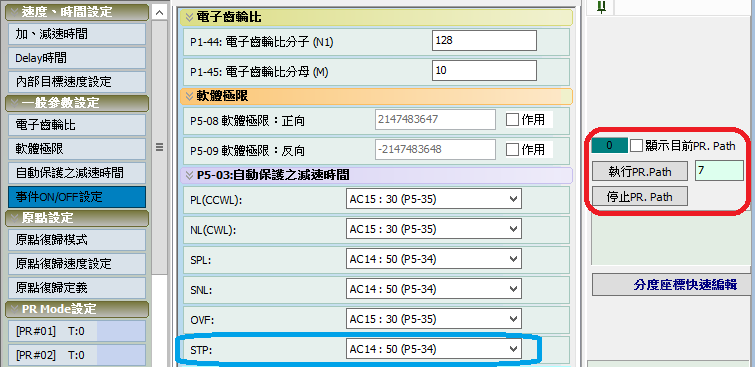
- 寫入 1000:停止當前執行的 PR 命令,減速時間由 P5-03.STP 指定,或由 下圖籃框 中設定!
- 可由 面板,通訊(USB/RS-232/CANopen/DMCNET/EtherCAT)寫入
特殊事件觸發:
- CAP 完成=》觸發 PR #50
- CAP 執行時,P5-39.X3 必須設定 = 1
- 所有 P5-38 個點抓取完成,才會觸發
- CMP 完成 =》觸發 PR #45
- CMP 執行時,P5-59.U1 必須設定 = 1
- 所有 P5-58 個點比較完成,才會觸發
- 凸輪脫離 =》觸發 PR #(P5-88.BA)
- 脫離條件 P5-88.U = 2,4,6,A,C,E 成立時則觸發
- 強制寫 P5-88 = 0 脫離則 不會觸發
在 PR 編輯器(如下圖右方紅框)中,輸入欲執行的 PR #編號,按下 “執行” 即可,在調機測試時 非常方便!
M-R能走PR模式的指令吗?尝试过用MR的標準 DI.POS 5 ~ 0 + DI.CTRG 觸發,触发不了PR指令,反而A2的就可以。
M-R 不支持PR模式,而是提供 二次平台 ezASD 來進行開發,例如用 M-R 內部的 PLC 程式觸發 API 做運動控制,可參考以下連結:呼叫 API 的方法: