台達 A2伺服 的電子凸輪提供 “虛擬主軸” 功能(不是指 時間軸 與 電壓軸),而是額外由 P2-77 控制的主軸脈波.由 => 凸輪系統架構圖 最左側可以看到 P2-77 虛擬脈波 會與 P5-88.Y 真實主軸脈波 疊加在一起,然後才進行凸輪命令的計算.本篇說明如何利用 虛擬主軸 來做 凸輪相位調整,並提供完整的 PR 程序設定方法,不論在實體主軸有無運轉的情況下都適用!
虛擬主軸 功能概述
根據 P2-77.X 虛擬主軸 功能分為:
- 真實主軸脈波遮除:X = 1~5,真實主軸脈波 P5-88.Y 被遮除
- 虛擬脈波也遮除:X = 1,所有主軸脈波都遮除,即使凸輪嚙合也不動!
- JOG:X=2(正向)/3(反向),每 ms 持續產生 UZ 個 虛擬脈波.
- Inch 吋動:X=4(正向)/5(反向),產生 UZ 個虛擬脈波,然後就停止.
- 真實與虛擬主軸 同時作用:上述 X = 2~5 再加 8 即可!
- 虛擬主軸 功能關閉:X=0
人機介面的 畫面規劃
在 HMI 的畫面裡,建造 2 個按鈕,如下:
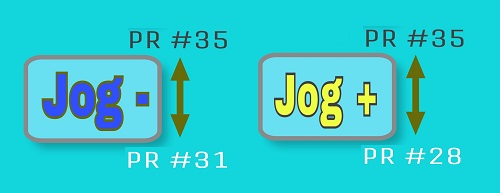
- JOG+:按下時,用通訊寫 P5-07=28,放開時 寫 P5-07=35
- JOG-:按下時,用通訊寫 P5-07=31,放開時 寫 P5-07=35
寫 P5-07 = N 是用來觸發 指定編號#N 的 PR.
PR 程序的設定
在 A2 伺服輸入如下的 PR 程序:
- JOG + 按下時:
- PR#28:寫參數 P2-77 = 0,INS=1,AUTO=1(自動下一 PR)
- PR#29:寫參數 P2-77 = 0x020A,正向 JOG
- JOG – 按下時:
- PR#31:寫參數 P2-77 = 0,INS=1,AUTO=1(自動下一 PR)
- PR#32:寫參數 P2-77 = 0x020B,反向 JOG,INS=1,AUTO=1
- PR#33:寫參數 P1-22 = 0,關閉反轉禁止(若無使用 P1-22 可省略)
- 自動計算 並 記憶前置量 P5-87
- PR#35:寫參數 P2-77 = 0x020,計算並記憶 P5-87
PR 程序設好後,當凸輪嚙合時,按下 JOG+/JOG- 按鈕,就可以產生虛擬脈波來調整 凸輪 主/從軸的 相位關係,JOG 的速度可利用 PR#29 與 PR#32 中的 高二位數來設定!當調整好後,凸輪即使脫離後重新嚙合仍然會維持一樣的相位,原因在於 PR#35 有將當時的調整值儲存到 前置量參數 P5-87 之中!這是 A2 伺服內部自動計算的,使用起來就方便多了!
參考:A2 凸輪 系統架構.