位置坐標 是用來表示 伺服所在位置的,通常藉由 回原點 的方式來建立 坐標系,讓 坐標數值 與 機械的位置 連結起來!但有時需要在伺服運動中 改變當前的 坐標數值,不能採用 回原點方式,以免打斷當前的命令!本文提供一種 “運動中 瞬間改變 坐標值 的方法“,供大家參考:
作法是利用 高速抓取,將 DI7:CAP 發生瞬間的 位置坐標 改成 P5-76 的值,功能特徵如下:
- 任何模式(P1-01=?)皆可使用
- CAP 高速抓取 反應即時(< 5 us),精度高!
- 一段距離就 重建 坐標系,可避免 坐標溢位。
- 是隱藏版的 回原點功能!
作法 步驟如下:
- 參數初始化(只需設定一次):
- P2-16=0:關閉 DI7 預設的極限功能,避免跳 AL.015
- P1-19.X=0:關閉CAP循環模式
- 開啟 CAP 功能,動態修改 坐標值:
- 設定 P5-38 =1:抓取 1 點即可,注意此時 P5-39.X 必須=0,否則無法寫入 P5-38.
- 設定 P5-76 = 坐標重置的 目標值.
- 設定 P5-39=0x2033,開啟 CAP 功能,並設定 抓取的第一點坐標重置。
設定完成,就可以讓伺服運轉(任何模式皆可),當 DI7 上升緣發生時,就會把當時的坐標 瞬間改成 P5-76,並且不影響當時的伺服命令! 伺服的位置坐標可由 監視變數 V000 觀察到,實際的結果如下圖所示:
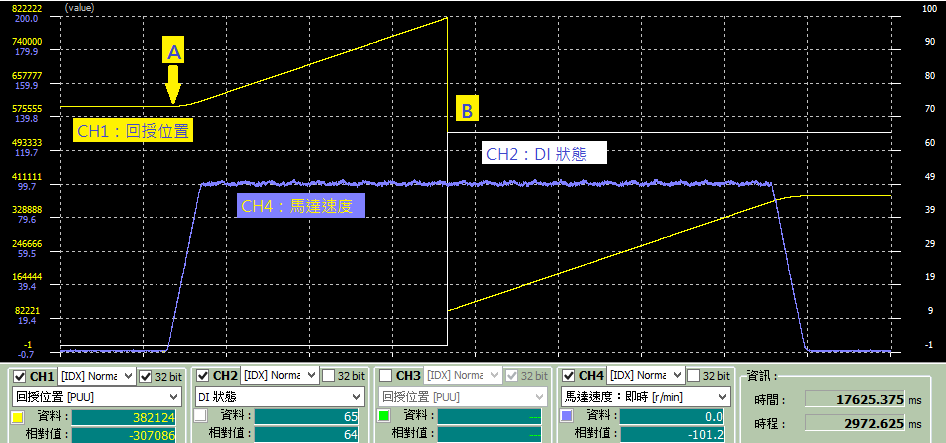
- CH1:為 馬達回授 的 位置坐標(PUU)
- CH2:為 DI 狀態,圖中 B 點處 DI 7:Off => ON,CAP 抓取發生!
- CH3:為 馬達當時速度(r/min),不受坐標改變的影響.
當馬達由 A點 開始加速時,位置坐標 CH1 也開始增加,到達 B點 時,由於 DI7 Off => ON ,高速抓取發生,就把CH1 位置坐標瞬間修改成 P5-76(設定值是100000),但是不影響當時執行的命令,馬達速度 CH3 仍然不變!
CAP 抓取功能重置
一旦抓取成功後,CAP 功能就關閉了(P5-39.X0=0),且 P5-38 也變成 0,若要再次執行抓取,只需要重複 前述 步驟 2 即可!
PR/CANopen pp 模式 命令終點 也被重置
在 PR 模式 或 CANopen profile position 模式下,當 CAP 把位置坐標 修改成 P5-76 後,PR 的 命令終點 也會改到 P5-76 處,換言之,此時下達 PR 增量0 的命令就會 定位到 CAP 發生的位置,需特別注意!絕對定位命令 也會以新建立的坐標為準!
在某些應用,坐標 必須根據 加工物 出現的位置 重新定義,便適用此種方法。每次 CAP 後,坐標 P5-76 都會 連結到 產品出現的位置,除了方便計算 後續的命令以外,也避免了坐標系 的溢位問題,對於 無限行程的機構應用 很有幫助!
參考:直線與分度坐標,PR 絕對/增量/相對/CAP 命令,回原點常見問題