使用台達 A2伺服 的電子凸輪時,有時需要讓 凸輪嚙合一週後脫離,可以搭配 脫離條件 P5-88.U = 2,4,6,且P5-83=1。然後設定 P5-84 = P5-89 =<指定的主軸脈波數>即可達成。由於主軸脈波數可能會動態修改,可用 2 個 PR 來寫入 P5-84 與 P5-89,舉例如下 …
台達伺服
台達伺服驅動器
EzASD 如何編寫自訂API 函式庫的Help
底下將說明如何編寫自訂MYAPI1 和MYAPI2 兩個API的Help說明文件。

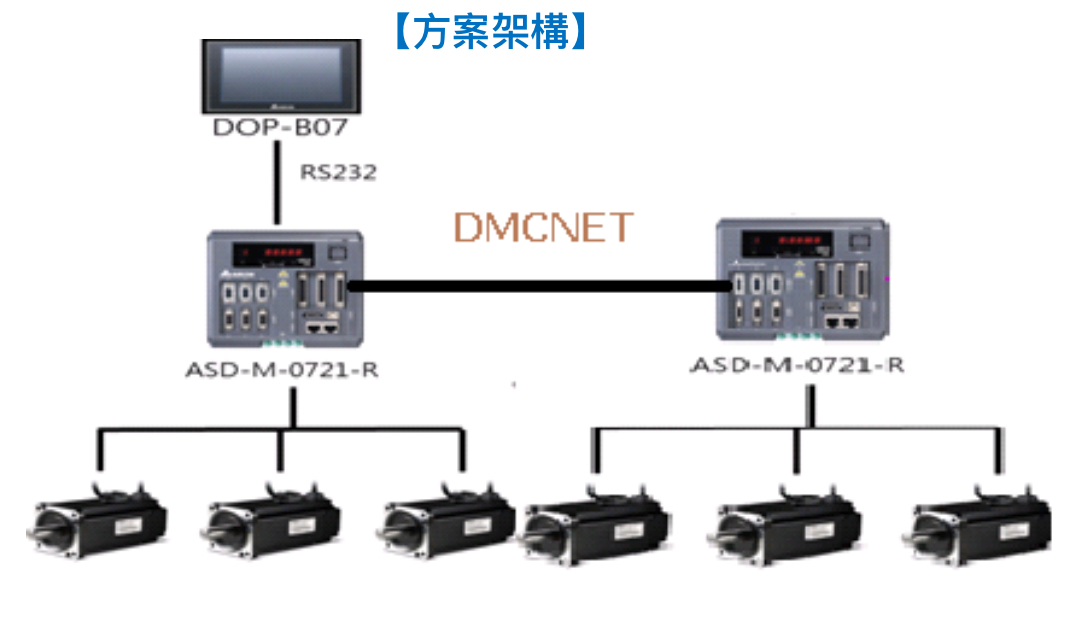
台達 A3 伺服(官方)教育訓練文件
教育訓練文件")
本文內附台達 A3 伺服之 官方教育訓練文件 連結,主題包含:A3 功能簡介,調適方法,運動功能,電子凸輪,PR(四則運算)… 等等,有興趣的讀者可以直接下載使用!
巨集 #7 飛剪造表(1)準備工作
準備工作")
飛剪應用時,只要裁切長度改變,飛剪曲線就必須重新建造,不像其他凸輪曲線(例如直線,梯形,…)只要更改參數即可!因此,使用PC軟體建造飛剪曲線的意義不大,因為需要時常更改.台達 A2/M-R 伺服內建 飛剪曲線造表功能- 巨集 #7,只要切長改變,便可立即造出新的曲線!本文說明使用 巨集 #7 的 準備工作與注意事項,供使用者參考 …
M-R 理料線案例
最近一期的台達機電電子報(124期)有篇 M-R 理料的案例,詳情見 台達交流伺服驅動系統打造卓越理料線解決方案,實現高精高速食品包裝排列工序,
EzASD 資料存放路徑

目的:為了保有使用者的應用函式庫\參數自訂群組\示波器快速設定選單..等資料,不會因為更新軟體而不見或覆蓋掉,所以讓使用者可自行決定資料的存放路徑。
A2 凸輪銜接 PR(CAP+Data)的問題與修正法
AL.025 編碼器 內部錯誤-台達伺服
| 異警 名稱 |
一次因 | ALM | WRN | SRV ON | 清除 方式 |
|---|---|---|---|---|---|
|
AL.025 編碼器 內部錯誤 |
編碼器內部記憶體異常,內部計數器異常 | ⊗ | No | 重上電清除 |
AL.024 編碼器 初始磁場錯誤-台達伺服
| 異警 名稱 |
一次因 | ALM | WRN | SRV ON | 清除 方式 |
|---|---|---|---|---|---|
|
AL.024 編碼器 初始磁場錯誤 |
編碼器磁場位置 UVW 錯誤 | ⊗ | No | 重上電清除 |
ASDA-Soft 下載參數 一次就成功的方法
當台達 A2伺服 調試完成後,通常會用 ASDA-Soft 將驅動器裡的參數全部讀出 並且存檔,以便複製到別的伺服內!但常常發現 下載參數時 並不順利,有些參數會一直寫不進去!發生的原因請參考:參數無法寫入的原因(參數互鎖).本文說明如何排除這種問題,讓下載所有參數一次就能成功!