ASD-A2 的電子凸輪架構圖,加入了主軸虛擬脈波 P2-77 與 PR路徑命令的疊合 說明如下:(可直接點選圖中子系統開啟連結)
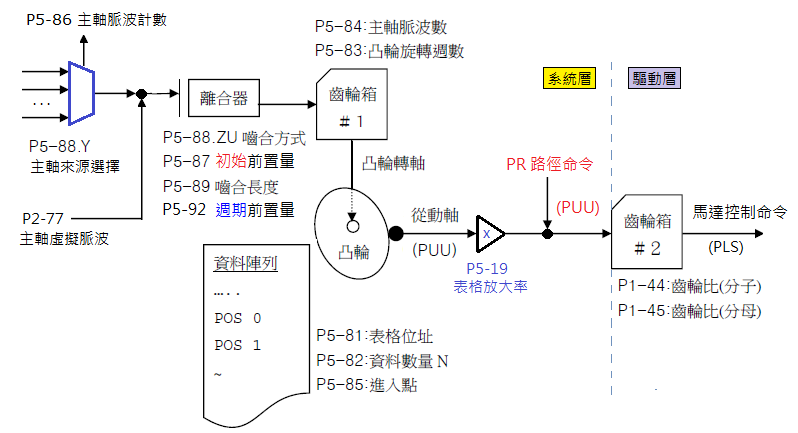
(圖一) A2電子凸輪方塊圖-資料來源:台達電子ASD-A2使用手冊 與 筆者整理
各區塊簡述如下:
- 主軸虛擬脈波:額外的虛擬脈波,由 P2-77 控制,與 主軸脈波源 疊加,也可以遮除 主軸脈波源!通常用於凸輪相位調整.
- 齒輪箱#1:用來設定 主軸脈波數 與 凸輪週期 的關係,即 P5-84 個主軸脈波,凸輪運轉 P5-83 周.相當於收到 ( P5-84/P5-83) 個脈波,凸輪旋轉一周,因為可能除不盡,所以用2個參數來設定!
- 凸輪區塊:凸輪曲線定義在資料陣列中,開始位址在 P5-81,曲線等分成 P5-82 區.每個資料代表每區對應的從軸位置(PUU).因第一點(0º)與最末點(360º)不一定重合,故總共會有 (P5-82+1)個資料點.
- 表格放大率:可用 P5-19 調整表格資料的倍率,預設值為 1.0 倍.
- PR 命令疊加:任意時刻,PR 命令與凸輪命令都是疊合的,PR 可用於 凸輪命令的 修正與補償!