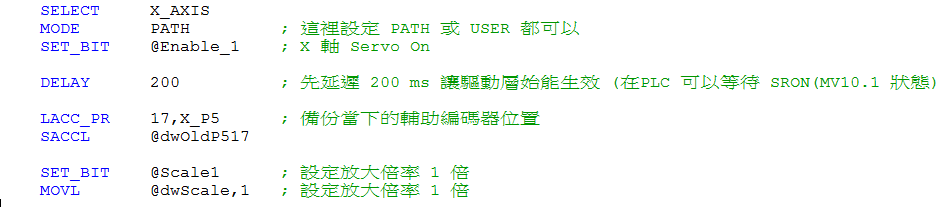
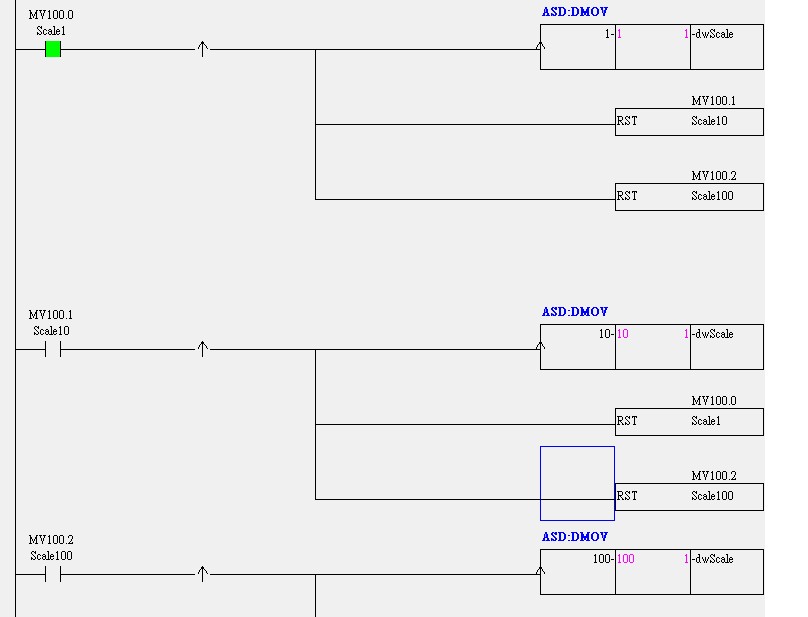
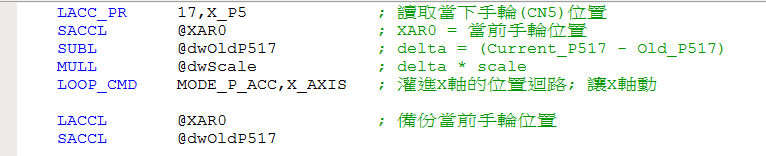
M-R 手輪開發範例 yujan ASD-M-R, M-R 功能說明, M-R 案例分享, 台達伺服 2016-08-172016-08-20Delta ASD-M-R, 台達伺服 0 Comment 手搖輪操作在需多機台上都會用到,特別是教點的場合,本篇文章提供一個很簡單的範例方案:其動作如下 上電初始化: (設定模式、ServoOn、紀錄一開始的輔助編碼器位置、預設手輪訊號倍率 1 倍) 背景PLC: 設定手輪脈波的倍率 高速PLC:(每個 ms執行手輪操作X軸) 高速PLC_手輪操作X軸:(抓取輔助編碼器的差量 * 倍率後灌給X軸的位置迴路) Tweet電子郵件列印更多在 Tumblr 上分享 相關文章/Related Posts: