◉ A3 韌體燒錄檔
出廠韌體:link (密碼asd)

參考資料:A3 教學文件,手冊/型錄下載,ASDA V6 軟體下載,官網連結
♦ 二次平台教學文件, 韌體燒錄檔/工具下載,ST 編程語言
台達 A3 伺服 支援二次開發平台,使用者可以 撰寫程式 來實現客製化的應用,開發環境為 ezASD 軟件.本專頁提供相關資訊供使用者參考,內容建構中,使用者可先於上方連結下載 “教育訓練文件” 觀看...
♦平台介紹 & 教學:
| 起步 | 機種差異 | 韌體燒錄方法 | P2-08 特殊功能 | |
| 伺服狀態機 | PLC分區Modbus位址 | |||

水能載舟亦能覆舟
「多工」是運動控制的一項利器,但如果使用不當是可能替程序埋下一顆未爆彈
再者,多工所衍生的錯誤往往不好偵錯也不易重現,因此如何提升程序穩健性? 以正確的多工觀念來開發是大家必精進的課題
本文以ServoMotion的多工機制為基礎,演示一些容易衍生錯誤的多工手法,盼讀者能以之為借鏡,避免重蹈覆測。

二次平台框架下,四個狀態(DISABLE, ENABLE, FAULT, Q-STOP)切換原則是個鐵律
身為開發者的你,必須依附這個鐵律下進行開發
筆者建議您在開發前先明確的了解狀態機流程,並於開發中適時的採用正確的狀態來進行流程控制

台達伺服ServoMotion框架有支援衍生數據類型(Derived Data Type),它是一種定義在IEC61131-3的數據類型。
本文一開始先大略的簡介IEC61131-3數據類型,隨後將重點聚焦在DDT如何使用與編寫。
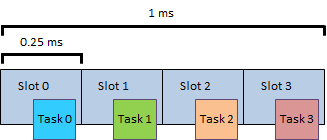
台達智能伺服為硬即時多工系統,採4個時槽(Slot)平分1毫秒的概念進行設計
如果你想更清楚多工切換的時序,首先你必須先把握下列多工切換三原則
1. 時槽已有指定的工作則執行該工作
下圖是系統內定Slot與Task的對應圖,當時間進入到Slot 0時開始運行Task 0,緊接著當時間進入到Slot 1時則切換至Task 1 運行,依此類推。