M-R 記憶體分區 總表 => MV 分區內容
台達 M-R 伺服內含 PLC 的 MV 分區記憶體,此區以 MV100 為分界:
- MV0~MV99: 伺服標準的 DI/DO 功能控制區與系統保留操作區,此區在 PLC 開發 Motion 相關的功能時會經常用到,例如查看是否速度到達、伺服沒有有發生ALM 等,後續會詳細介紹。
- MV100以上:使用者可任意使用!
這裡介紹 MV 區 MV0~MV99 中伺服標準 DI/DO 節點:
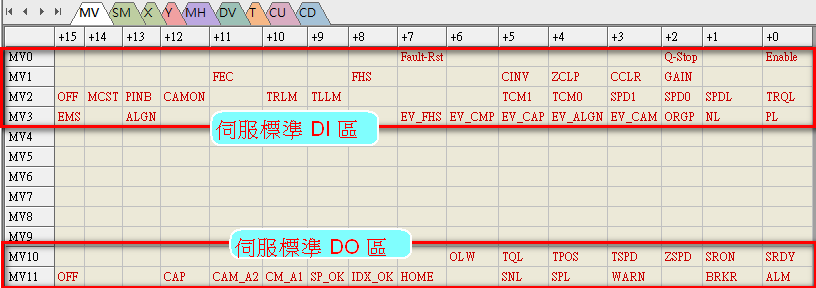
上圖僅列出X軸的相關 DI/DO節點,Y軸與Z軸節點為 X軸節點平移 20、40 Words,即:
X軸 DI 範圍 MV0~MV3;DO 範圍 MV10~MV11
Y軸 DI 範圍 MV20~MV23;DO 範圍 MV30~MV31
Z軸 DI 範圍 MV40~MV43;DO 範圍 MV50~MV51
另外有三軸共用的 DI 在 MV59
為什麼會說伺服標準 DI DO 區呢?
台達伺服 CN1 上都有提供 DI/O 可以透過 P2-10~P2-15(M-R 各軸有 6個DI);P2-18~P2-20(M-R 各軸有 3個 DO)做 DI/O 的功能碼設定;舉個例子:若 DI 功能碼設定為 Servo On,則該 DI 的硬體訊號則會連動到 MV0.0 (Enable);而其實真正讓伺服 Servo On 的關鍵口就是 MV0.0 這個 bit。當內部運作 MV0.0 (Enable/ServoOn) 是 On 就會下達 ServoOn 要求給底層控制層,反之則下達不ServoOn要求。所以不管是由外部DI透過功能碼設定連動 MV 區,還是直接針對 MV 區操作,只要 MV0.0(Enable) 是 True 就會對底層下達 ServoOn 要求。所以若想要省 DI ,二次平台的開發者可以直接操作 MV0.0 來節省一個外部 DI。
常用的相關操作有 MV0.7 (Fault-Reset錯誤重置)、MV3.15 (EMS 急停),可以在 HMI 上拉一個 Button (地址: MV0.7[fault-rst])就可以用通訊方式操作錯誤重置進而節省一個 DI。
甚至 PL(正極限; MV3.0)、NL(負極限; MV3.1)、ORGP(原點; MV3.2)這些回原點相關的 DI 都可以這麼用,特別是在 Lab 測試臨時找不到實體光標 DI 時,可以設定這些 MV 區節點 On/Off 來模擬碰極限或碰原點的動作。(但實際機台上需要固定的感測器位置來保證每次原點位置不變,所以通常這類DI功能都需要用到實體DI;省不了!)
介紹過概念後介紹一下這些節點功能,首先介紹 DI
| PLC位址 | 別名 | 功能碼 | 功能解釋 |
|---|---|---|---|
| MV0.0 | Enable | 0x01 | 此訊號接通時,伺服啟動(Servo On)。 |
| MV0.2 | Q-Stop | 0x0E | Quick Stop 指令。 |
| MV0.7 | Fault Rst | 0x02 | 發生異常後,造成異常原因已排除後,此訊號接通則驅動器顯示之異常訊號清除。 |
| MV1.2 | GAIN | 0x03 | 在速度及位置模式下,此訊號接通時(參數P2-27 需設定為1 時),增益切換成原增益乘於變動比率。 |
| MV1.3 | CCLR | 0x04 | 清除脈波計數暫存器,清除脈波定義參數P2-50 之設定。 |
| MV1.4 | ZCLP | 0x05 | 當速度低於零速度(參數P1-38)之設定時,此訊號接通後,馬達停止運轉。 |
| MV1.5 | CINV | 0x06 | 在內部位置暫存器和速度模式,此訊號接通後,輸入的命令將變成反向。 |
| MV2.0 | TRQL | 0x09 | 在速度及位置模式下,此訊號接通,馬達扭矩將被限制,限制之扭矩命令為內部暫存器(P1-12~P1-14)或類比電壓命令。 |
| MV2.1 | SPDL | 0x10 | 在扭矩模式下,此訊號接通,馬達速度將被限制,限制之速度命令為內部暫存器(P1-09~P1-11)或類比電壓命令。 |
| MV2.2 | SPD0 | 0x14 | 內部暫存器速度命令選擇(1~4)。 |
| MV2.3 | SPD1 | 0x15 | |
| MV2.4 | TCM0 | 0x16 | 內部暫存器扭矩命令選擇(1~4)。 |
| MV2.5 | TCM1 | 0x17 | |
| MV2.12 | CAM_ON | 0x36 | 電子凸輪嚙合控制 DI,搭配 P5-88.Z=1 DI:CAM 控制嚙合時機。 |
| MV2.13 | PINB | 0x45 | 在PT 模式下,此訊號接通時,外部脈波輸入命令無作用。 |
| MV3.0 | PL | 0x23 | 正向運轉禁止極限。 |
| MV3.1 | NL | 0x22 | 逆向運轉禁止極限。 |
| MV3.2 | ORGP | 0x24 | 在內部位置暫存器模式下,在搜尋原點時,此訊號接通後伺服將此點之位置當成原點。通常外接HOME Sensor。 |
| MV3.3 | EV_CAM | 無 | 凸輪脫離事件,當凸輪脫離後輸出。(此事件沒有DI配置功能功能碼,僅二次平台使用,且需由使用者手動清除。) |
| MV3.4 | EV_ALGN | 無 | 輪對位事件,執行凸輪對位後系統會進行對位誤差計算,計算結束後會輸出此訊號,並將誤差量寫入特定位址,再由使用者程式根據誤差量進行修正。。(此事件沒有DI配置功能功能碼,僅二次平台使用,且需由使用者手動清除。) |
| MV3.13 | ALGN | 0x35 | 凸輪對位光標訊號輸入。 |
| MV3.15 | EMS | 0x21 | 此訊號接通時,馬達緊急停止。 |
以上是MV 區標準DI功能介紹,下表為 DO 功能
| PLC位址 | 別名 | 功能碼 | 功能解釋 |
|---|---|---|---|
| MV10.0 | SRDY | 0x01 | 當控制與主電路電源輸入至驅動器後,若沒有異常發生,此訊號輸出訊號。 |
| MV10.1 | SRON | 0x02 | 當伺服啟動(Servo On)後,若沒有異常發生,此訊號輸出訊號。 |
| MV10.2 | ZSPD | 0x03 | 當馬達運轉速度低於零速度(參數P1-38)之速度設定時,此訊號輸出訊號。 |
| MV10.3 | TSPD | 0x04 | 當馬達轉速高於設定目標速度(參數P1-39)設定時,此訊號輸出訊 號。 |
| MV10.4 | TPOS | 0x05 | 在位置模式下,當偏差脈波數量小於設定之位置範圍(參數P1-54 設定值),此訊號輸出訊號。 |
| MV10.5 | TQL | 0x06 | 當扭矩限制中時,此訊號輸出訊號。 |
| MV10.6 | OLW | 0x10 | 到達過負載準位設定時,輸出此訊號。(由參數P1-56 設定) |
| MV11.0 | ALM | 0x07 | 當伺服發生警示時,此訊號輸出訊號(除了正反極限,通訊異常,低 電壓,風扇異常) |
| MV11.1 | BRKR | 0x08 | 電磁煞車控制之訊號輸出,調整(參數P1-42 與P1-43 之設定) |
| MV11.3 | WARN | 0x11 | 警告輸出(正反極限,通訊異常,低電壓,風扇異常) |
| MV11.4 | SPL | 0x14 | 軟體極限(正轉極限) |
| MV11.5 | SNL | 0x13 | 軟體極限(反轉極限) |
| MV11.7 | HOME | 0x09 | 當原點復歸完成,代表位置座標系統有意義,位置計數器有意義,此訊號ON。初送電時,此訊號OFF,原點復歸完成,此訊號ON。運轉期間,持續ON,直到位置計數器溢位(包含命令或回授),此訊號OFF。當Pr 觸發原點復歸命令時,此訊號立即OFF,原點復歸完成,此訊號ON。 |
| MV11.8 | IDX_OK | 無 | |
| MV11.9 | SP_OK | 0x19 | 速度到達輸出:在速度模式下,速度回授與命令的誤差小於參數 P1-47 的設定值,則輸出ON。 |
| MV11.10 | CAM_A1 | 0x18 | 凸輪角度1 輸出,當凸輪角度達到P5-90 與P5-91 設定的範圍角度(0~360 度),此訊號輸出ON,離開此角度範圍則OFF。 |
| MV11.11 | CAM_A2 | 0xx1A | 凸輪角度2 輸出,當凸輪角度達到P2-78 與P2-79 設定的範圍角度(0~360 度),此訊號輸出ON,離開此角度範圍則OFF。 |
| MV11.12 | CAP | 0x16 | CAP 程序完成,Capture 到指定的個數(P5-38)後才輸出!當 CAP 完畢後會一直 ON 直到 啟動新的Capture (P5-39.X0=1)。 |
| MV11.15 | OFF | 0x0 |
另外還有三軸共用的DI (MV59)
| PLC位址 | 別名 | 功能碼 | 功能解釋 |
|---|---|---|---|
| MV59.0 | allEnable | 此訊號接通時,三軸伺服一起啟動(Servo On)。 | |
| MV59.1 | all Fault-Rst | 發生異常後,造成異常原因已排除後,此訊號接通則驅動器三軸顯示之異常訊號清除。 | |
| MV59.2 | all EMS | 三軸一起緊急停止 | |
| MV59.3 | DMC-Rst | DMC Error (SM15.15) 後需用此訊號清除錯誤 |