下表是 M-R PLC 分區表
 Read more
Read more
台達伺服
台達伺服驅動器
台達 A2 伺服 快速入門(1)
本篇針對 台達 ASD-A2 伺服 入門學習時的 常見問題與異警 加以彙整,以供讀者參考:
Q1,上電即顯示 AL.13/AL.14/AL.15 如何處置?
A => 為了安全的緣故,伺服的 DI 6/7/8 預設的功能 分別是 反轉極限/正轉極限/緊急停止,且都是 B(常閉)接點,所以在 沒有連接 極限保護時,一上電就會跳出上述的警報.如果 馬達(不是線性馬達)並未連接機構,使用者只是想做測試的話,可以暫時將這些保護功能解除,作法是將 P2-15,P2-16,P2-17 的百位數由0設為1,改成 A(常開)接點;或是直接將這三個參數全設為0,關閉這些保護功能!使用者測試時要格外小心,將 馬達固定牢靠,以策安全!
如何用 DI 觸發 台達A2伺服 走定長

在自動化設備的應用裡,時常需要用一個 DI 去觸發伺服馬達走一段距離,雖然是簡單的應用,但對伺服的初學者還是會感到茫然,本文針對 台達伺服 ASD-A2 PR模式 的設定方法,做逐步的解說:
首先執行 ASDA-Soft 軟體,連線伺服後,開啟 “數位 IO 吋動控制“,畫面如下:
台達 A2 伺服 原點回歸 常見問題
台達 ASD-A2 伺服 內建了 原點回歸 功能,使用起來相當方便,但初學者常會遇到一些問題,本篇將這些問題加以彙整,以供讀者參考:
原點回歸 功能常見問題整理如下:
Q1,原點回歸 不啟動?
A1:請依序檢查:
- 伺服模式 P1-01 必須是 1,即 PR 模式才有原點回歸功能,設定本參數須重上電才生效!
- 必須 SERVO ON(伺服使能)且 沒有任何警報(ALARM)發生!
台達 A2 電子凸輪 常見問題
由於 台達 ASD-A2 伺服 電子凸輪 一直沒有很好的學習管道,技術資料也不充分,導致使用者無所適從!此篇將常見的問題整理出來,以供讀者參考:
Q1,凸輪無法動作?
A1:請依序檢查:
一次搞懂多工排程
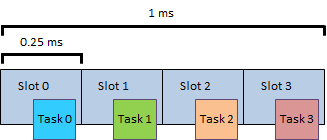
台達智能伺服為硬即時多工系統,採4個時槽(Slot)平分1毫秒的概念進行設計
如果你想更清楚多工切換的時序,首先你必須先把握下列多工切換三原則
- Task-Switching Rules
1. 時槽已有指定的工作則執行該工作
下圖是系統內定Slot與Task的對應圖,當時間進入到Slot 0時開始運行Task 0,緊接著當時間進入到Slot 1時則切換至Task 1 運行,依此類推。
10 個須學會台達 M-R 的理由

ASD-M-R 是 台達伺服 部門所開發的一款內含 運動控制器 的三合一伺服驅動器,是 根據 A2 Motion推廣經驗與使用者的反饋,參考世界一流品牌的產品特性,再加入團隊獨特的創意 所開發出來的!雖然市面上 運動控制器 已有不少,但 M-R 仍有許多獨特的優勢,值得推薦給大家:
M-R透過DMCNET擴充A2-F範例

AL.F21與Err Code

指令/API說明

