水能載舟亦能覆舟
「多工」是運動控制的一項利器,但如果使用不當是可能替程序埋下一顆未爆彈
再者,多工所衍生的錯誤往往不好偵錯也不易重現,因此如何提升程序穩健性? 以正確的多工觀念來開發是大家必精進的課題
本文以ServoMotion的多工機制為基礎,演示一些容易衍生錯誤的多工手法,盼讀者能以之為借鏡,避免重蹈覆測。

水能載舟亦能覆舟
「多工」是運動控制的一項利器,但如果使用不當是可能替程序埋下一顆未爆彈
再者,多工所衍生的錯誤往往不好偵錯也不易重現,因此如何提升程序穩健性? 以正確的多工觀念來開發是大家必精進的課題
本文以ServoMotion的多工機制為基礎,演示一些容易衍生錯誤的多工手法,盼讀者能以之為借鏡,避免重蹈覆測。
M-R 內部模擬出五核心的CPU架構,如下圖:
 Read more
Read more
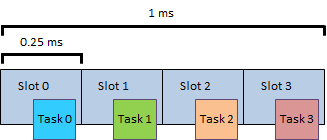
台達智能伺服為硬即時多工系統,採4個時槽(Slot)平分1毫秒的概念進行設計
如果你想更清楚多工切換的時序,首先你必須先把握下列多工切換三原則
1. 時槽已有指定的工作則執行該工作
下圖是系統內定Slot與Task的對應圖,當時間進入到Slot 0時開始運行Task 0,緊接著當時間進入到Slot 1時則切換至Task 1 運行,依此類推。
我們考慮一個運動控制常見的例子:X-Y 平台需走兩段直線路徑,第一段須走完才能走第二段,以閃避中間的障礙物.分別用二種語法撰寫並加以比較.
區分 輕重緩急")
